Today’s Progress:
Designer Engagement Session: Today, we had an enriching conversation with the designer of the Curio robot. We discussed various design aspects and gathered valuable insights to steer our prototyping process. Here’s a summary of the key points shared:
- Stepper Motors: The designer emphasized the use of stepper motors as the most cost-efficient option for achieving precision, a key requirement for the Curio robot.
- Constraints: Challenges include enabling the robot to tilt at various angles.
- Experimental Process: The designer acknowledged that a lot of the ongoing work is still experimental.
- Easy Assembly and Detachability: He pointed out that it takes a while to assemble the entire robot, and an easy-to-assemble and detachable design would be beneficial.
- Keeping Material Costs Low: Efforts are made to use cost-effective materials. For example, servo motors with electronic magnets were deemed impractical as they would cost two-thirds of the entire cost. The wheels and back wheel are always kept in stock, and materials used are kept simple, with possibilities of using 3D printing and plastic for wheels.
- Phone Stand: The current phone stand design was identified as a weak point due to its floppiness.
- Modularity: Modularity is preferred as most universities can 3D print the components.
- Hardware Constraints: Curio has a control board which is impossible to have users make from scratch. Thus, the main constraints for the robot are in hardware, specifically the motor.
Feedback on our Prototype:
- The designer suggested using a stepper motor instead of a DC motor (like in the Smartibot) to aid with precision.
- He praised the versatility of our design, which allows students to assemble the robot as per their preference instead of shipping a fully assembled bot, which might get damaged in transit.
- He was impressed with the clamp design, suggesting we should consider our specific use case and work towards it.
Teaching Assistant (claretb) Feedback
Team10B: We agreed that we need to further refine our design to increase its value in facilitating learning. This includes justifying design choices, such as the addition of a adjustable phone stand at the back of the Smartibot.
Claretb: It’s good idea exactly but can you explain more about how justifying design choices can make the learning better?
Team10B: Thanks for the question, when we mentioned ‘justifying design choices,’ we meant more about explaining the rationale behind why we’ve chosen to design our robot in a particular way. For example, from the student’s point of view, when they are building and using their Curio robots they are able to understand these design choices gives them insight into how the robot works and why.
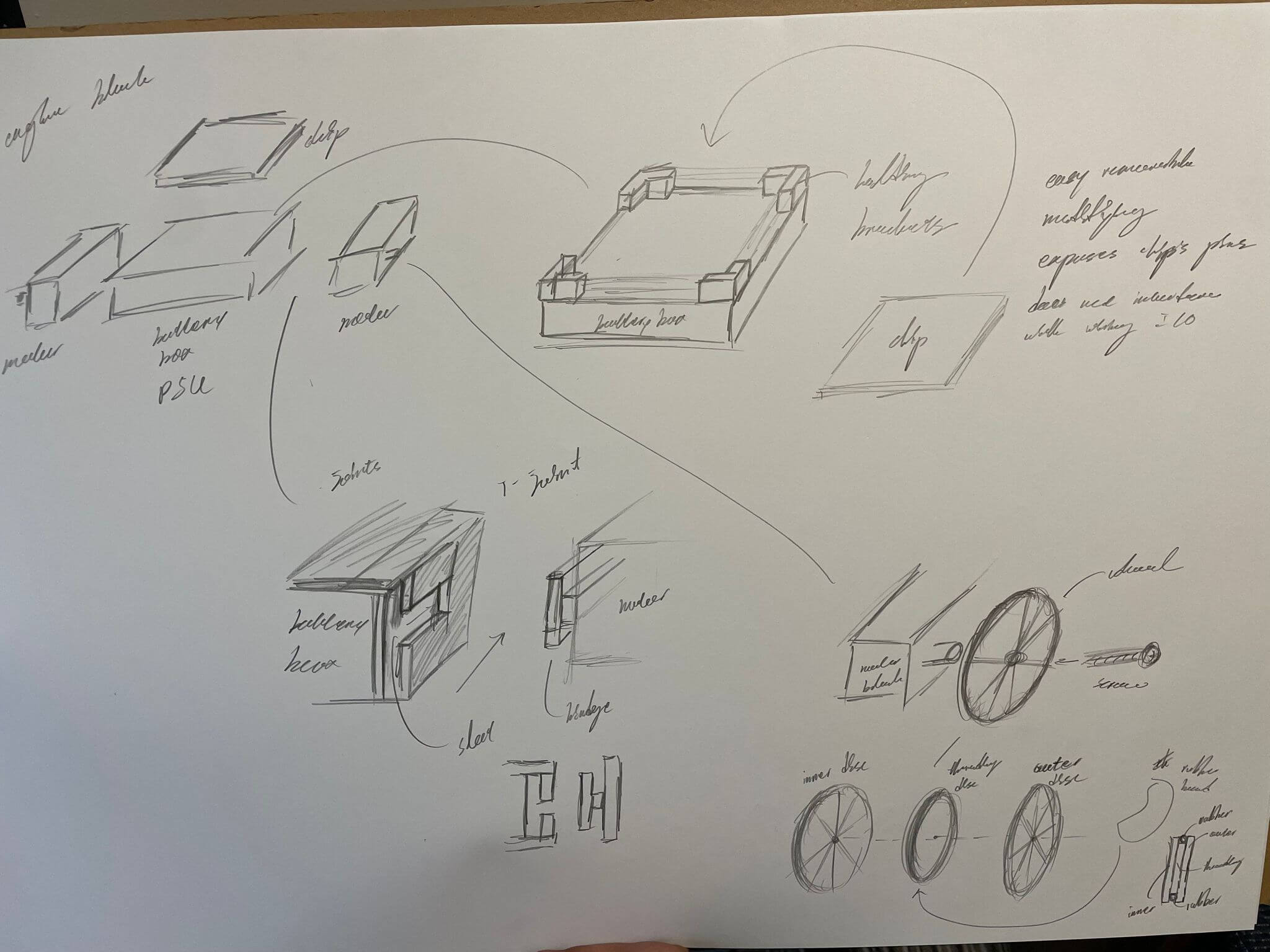
Sketches
We came out with another prototype sketch.
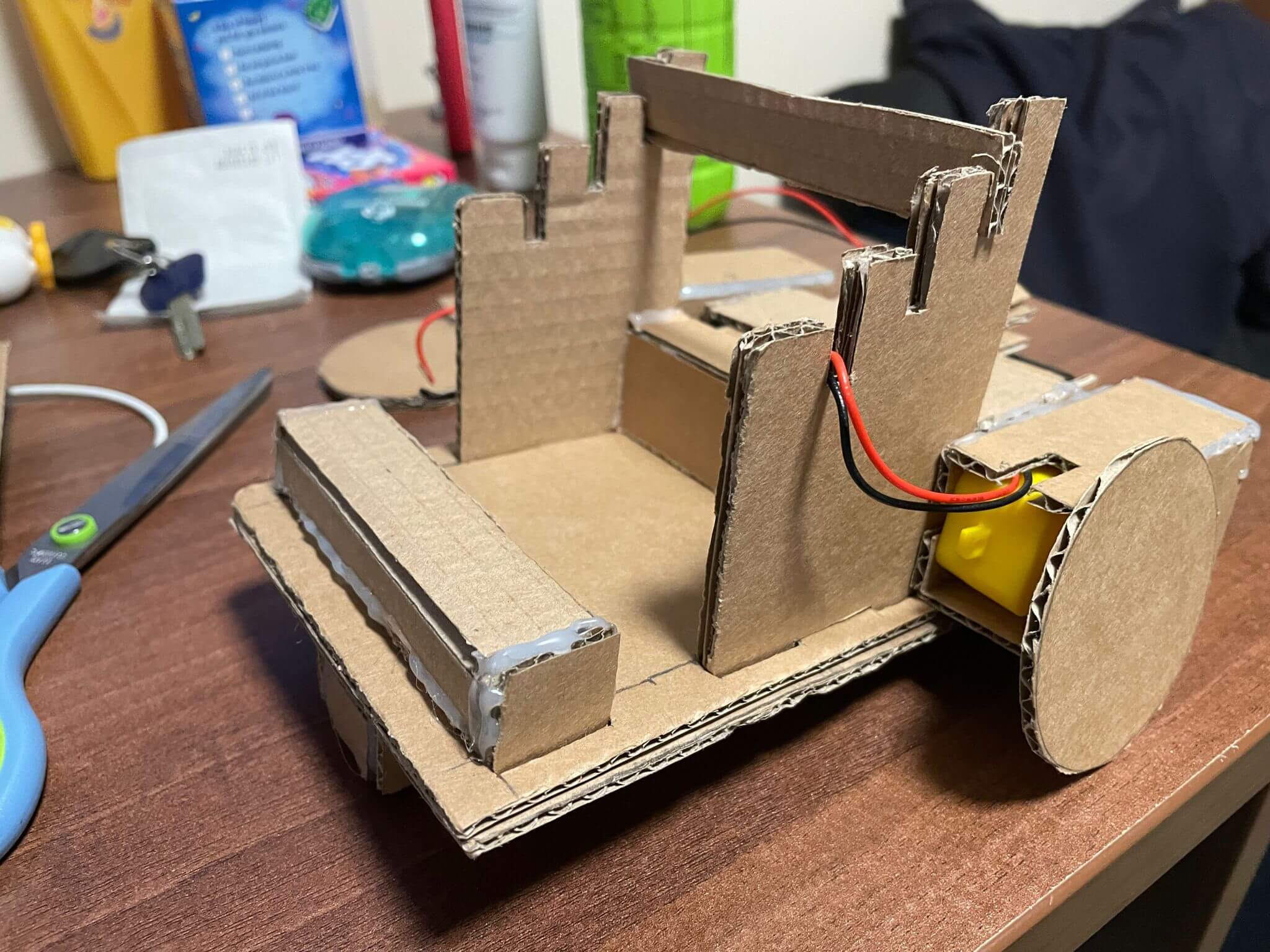
Prototype
We use cardboard to make the sketch prototype.
Front:
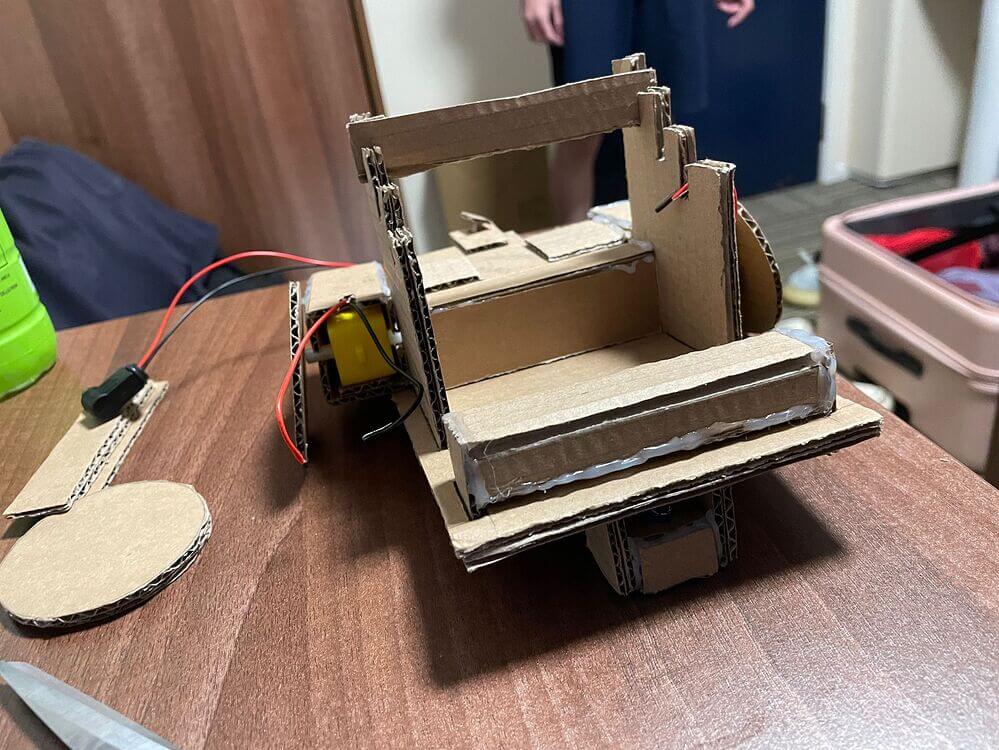
Side: