Today’s Progress:
Integrative Thinking Template: During our class today, we learnt about the concept of integrative thinking. This problem-solving approach allowed us to explore ways to leverage opposing models to generate innovative solutions. We’ve learned and practiced the step-by-step process, as outlined below:
Identify Two Opposing Models: This involves identifying two contrasting models or solutions based on a problem statement.
Build a Pro-Pro Chart: In this step, we learned to identify the advantages of each model, encouraging us to value and leverage the strengths of each.
Identify the Tension: We discovered how to highlight the core tension between the models
Create a new Choice: With a clear understanding of the tension and the pros of each model, we then innovated a new model that integrates the strengths of both while addressing the tension.
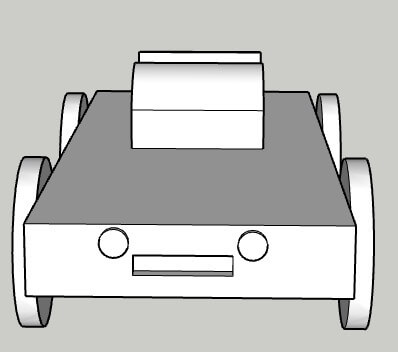
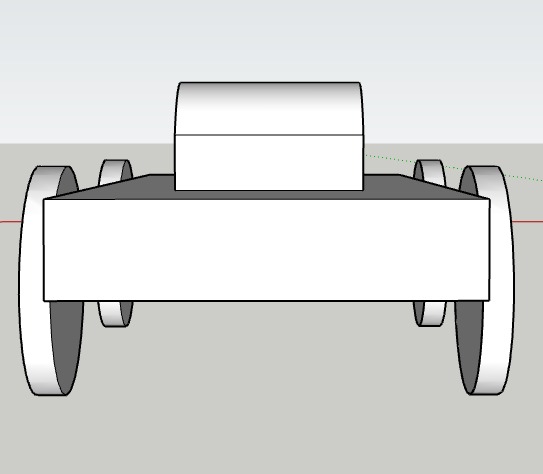
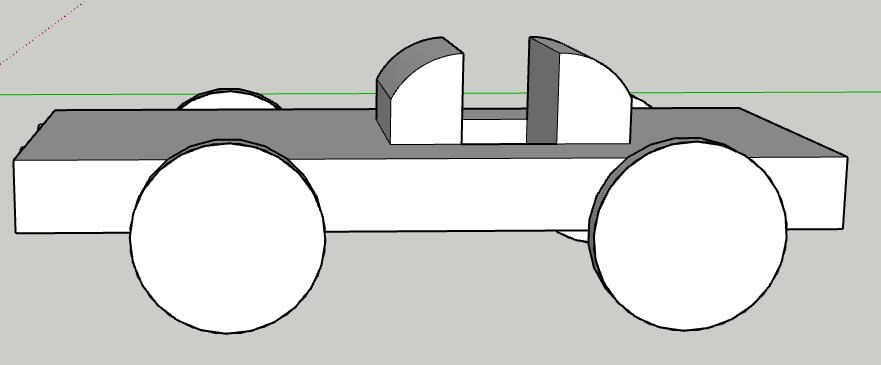
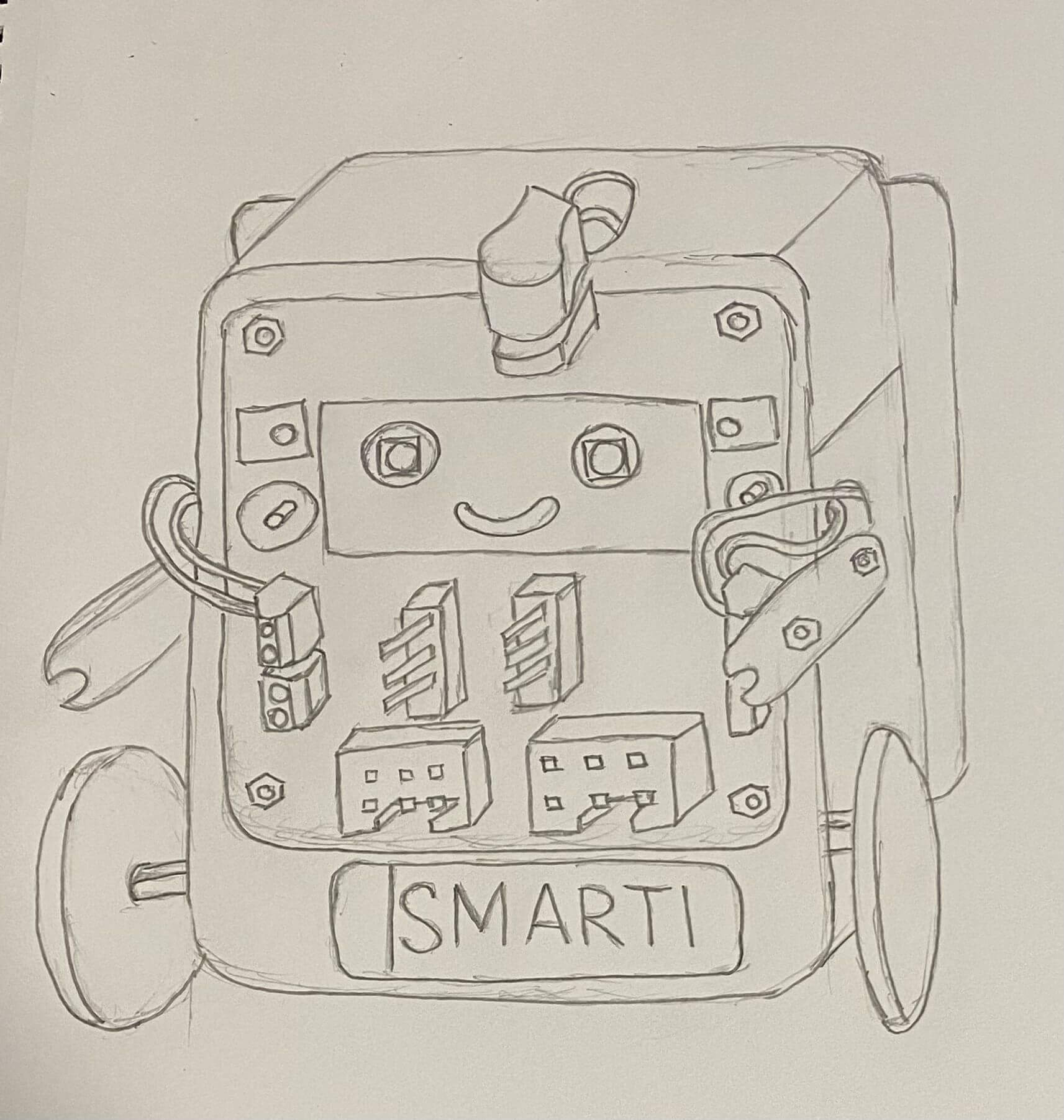
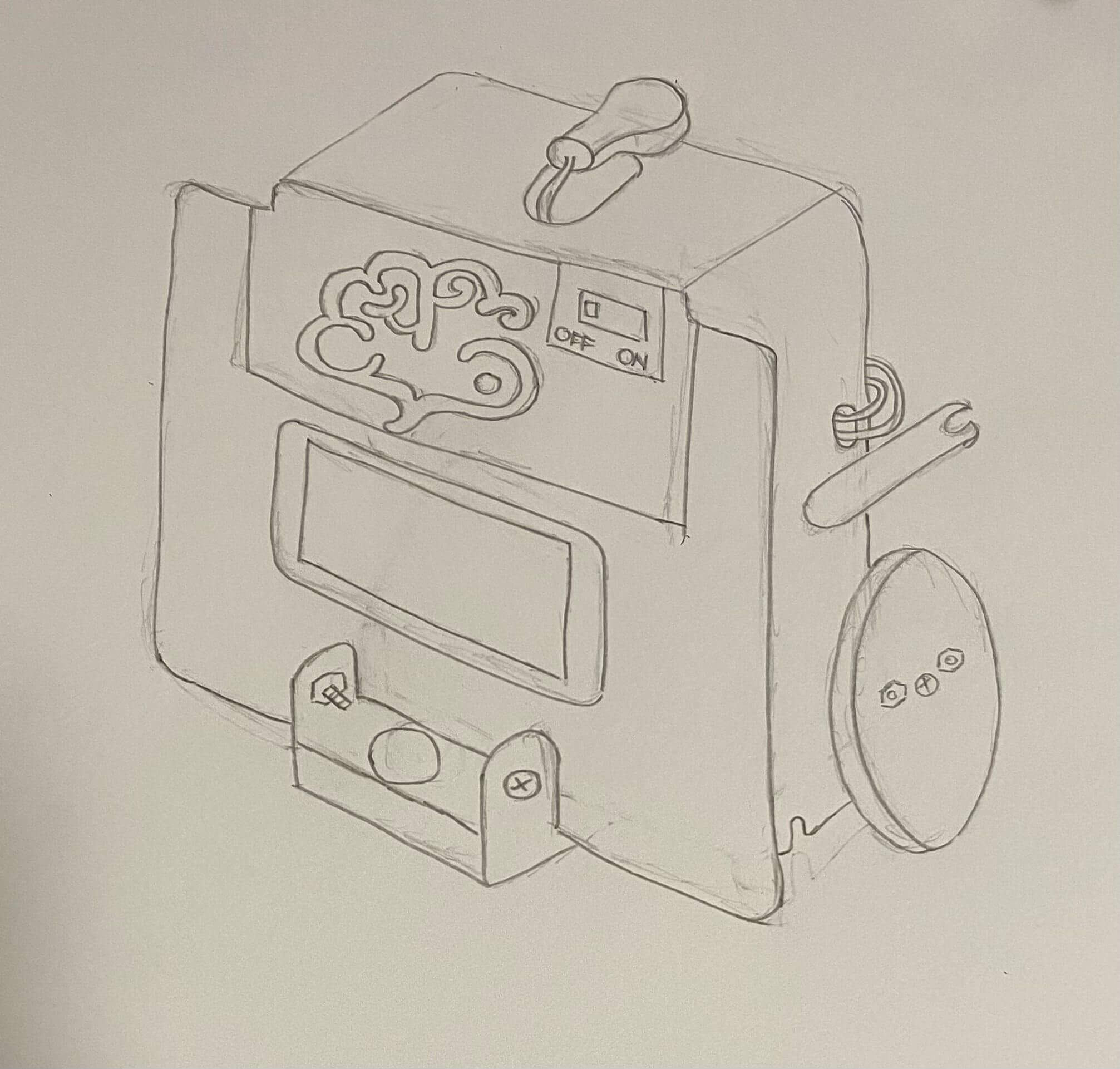
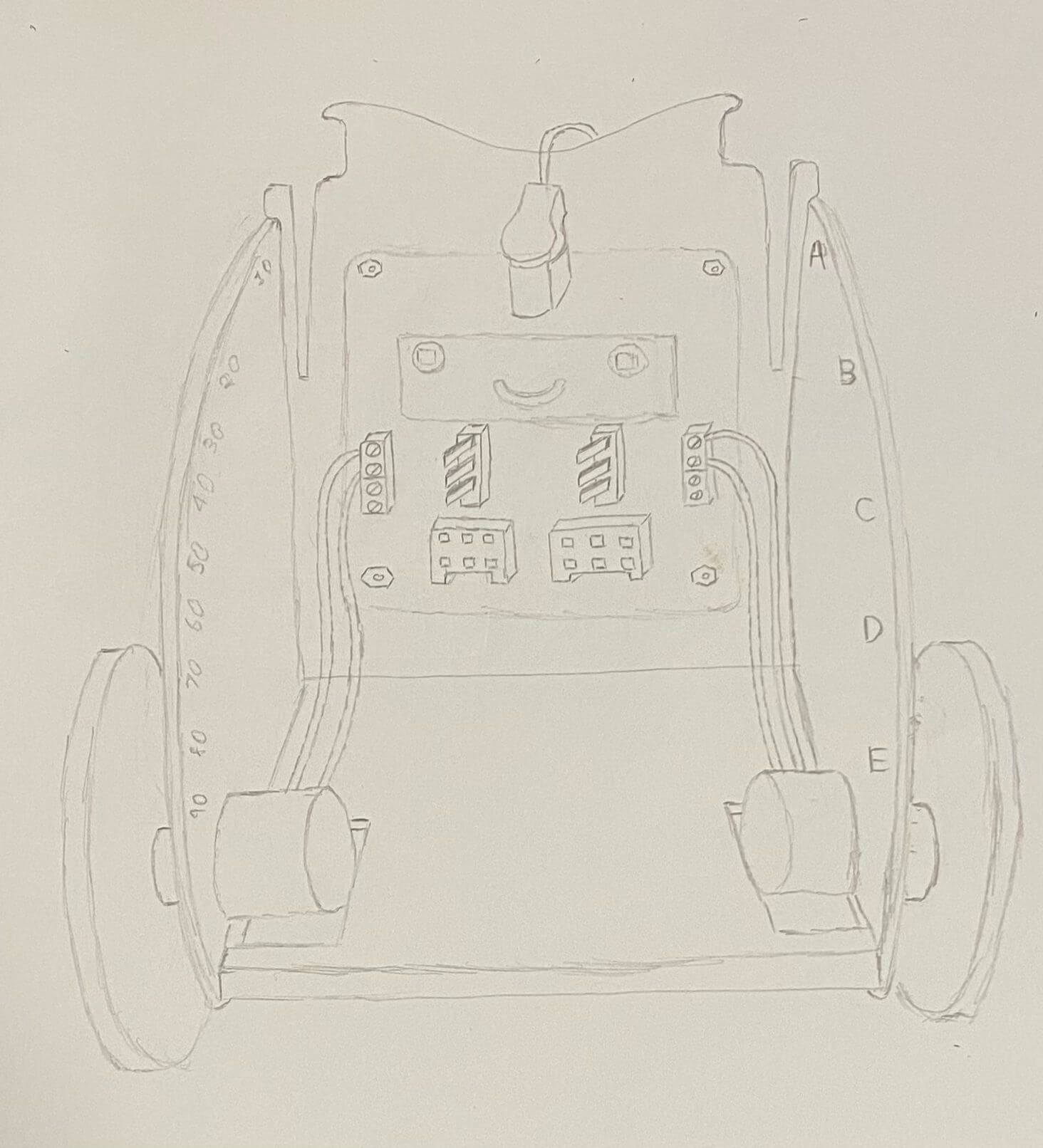
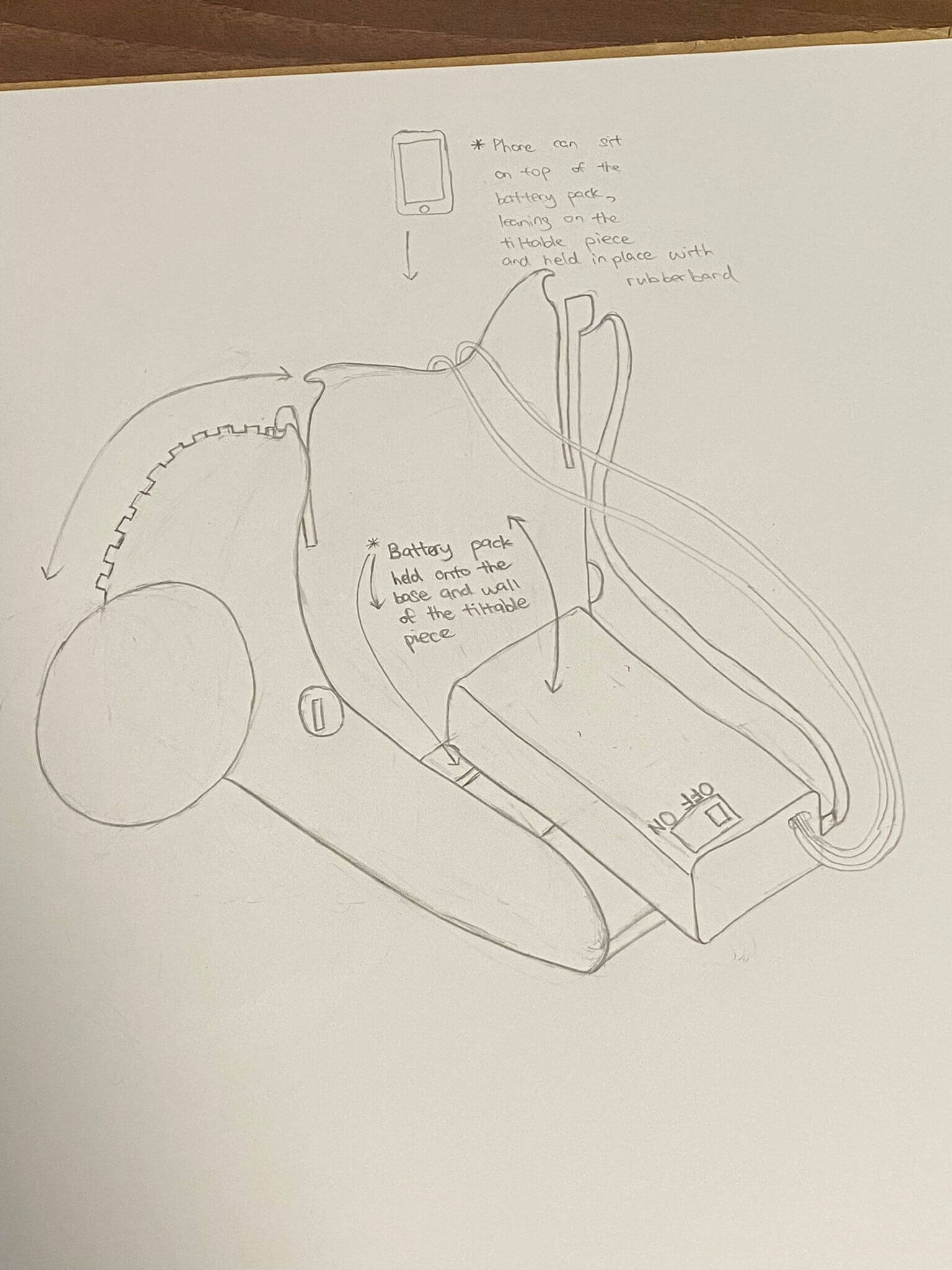
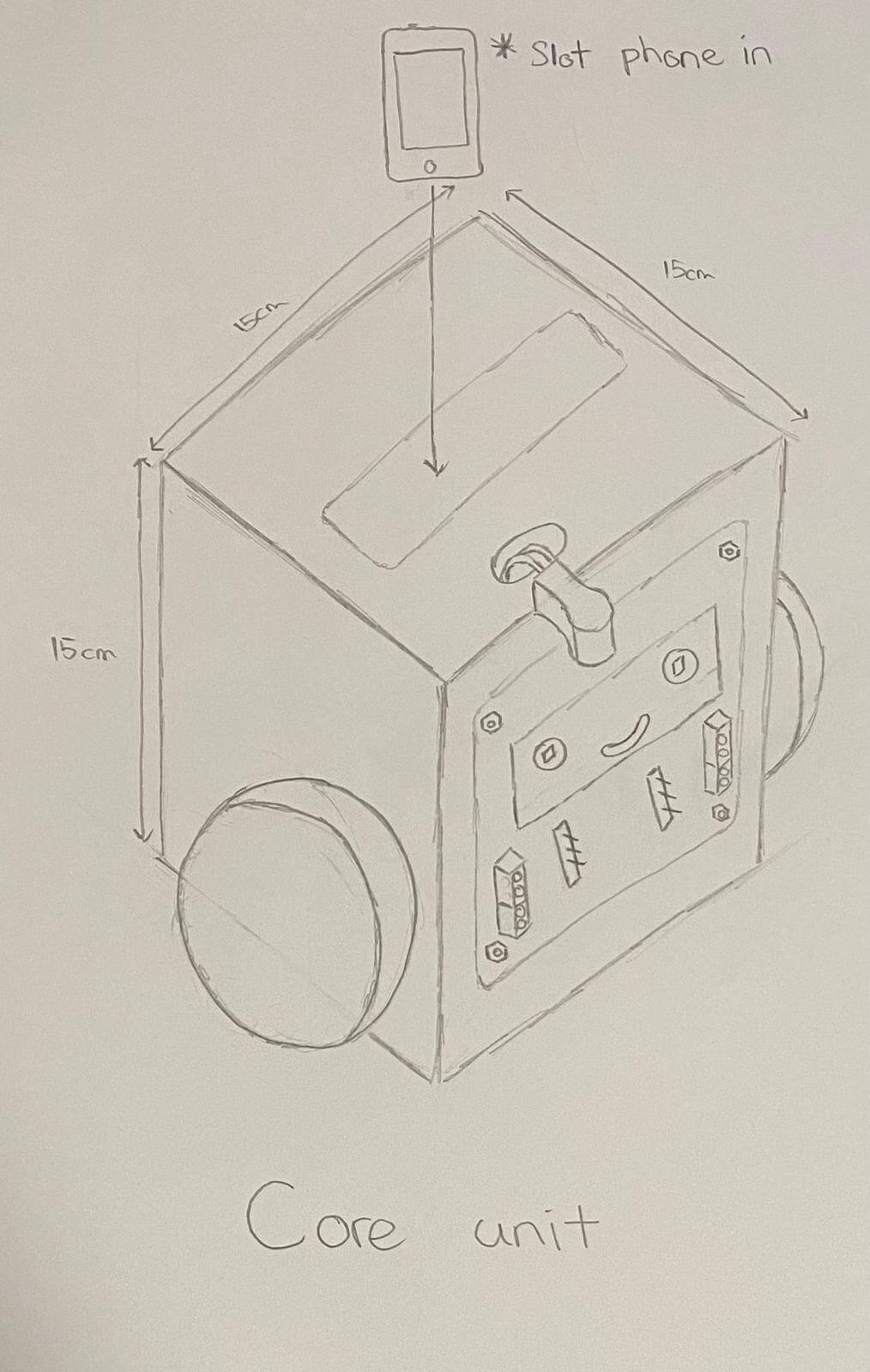
Sketch Updates
Alongside our classroom learnings, we continued to build on our design sketches.
Teaching Assistant (claretb) Feedback
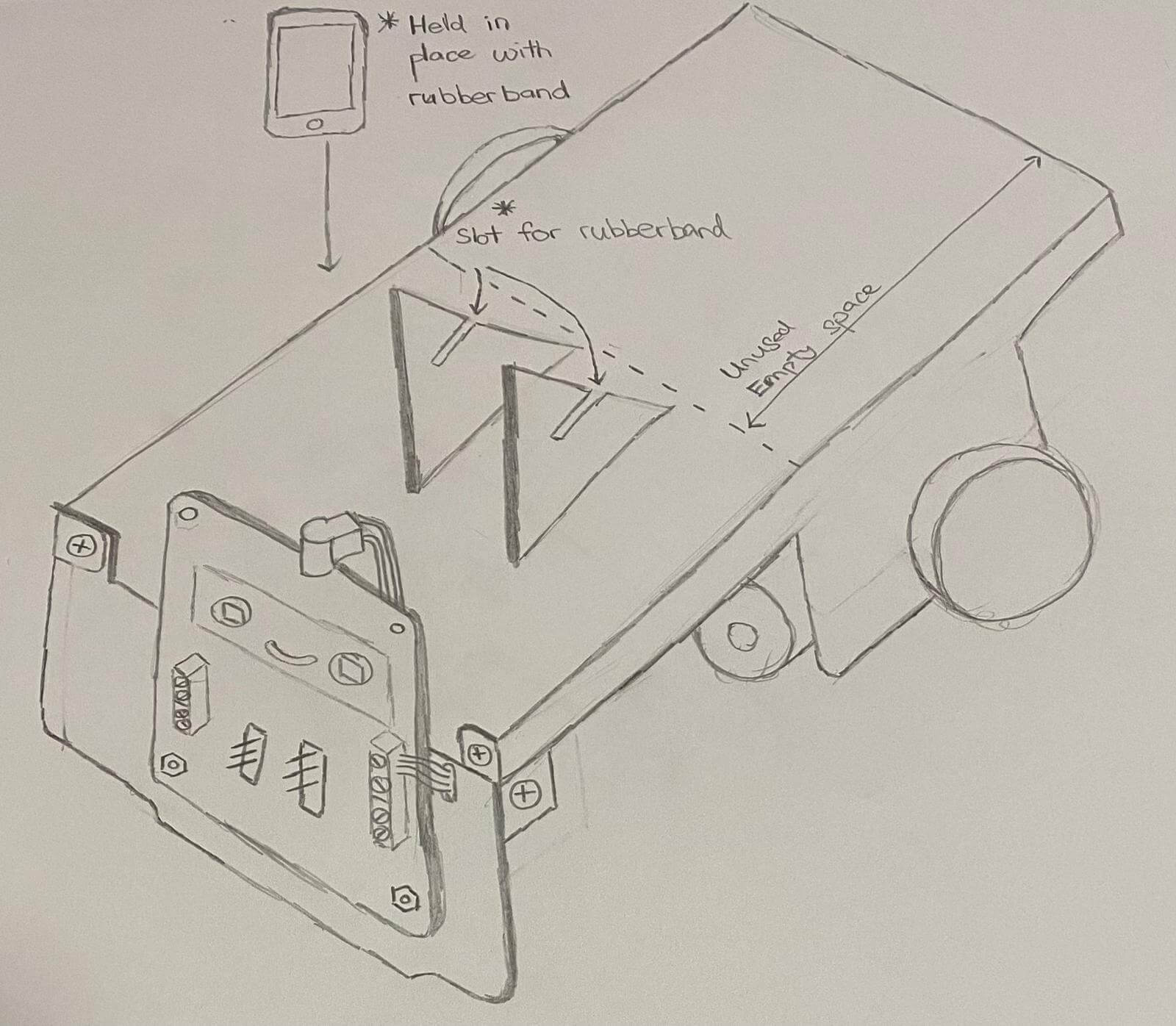
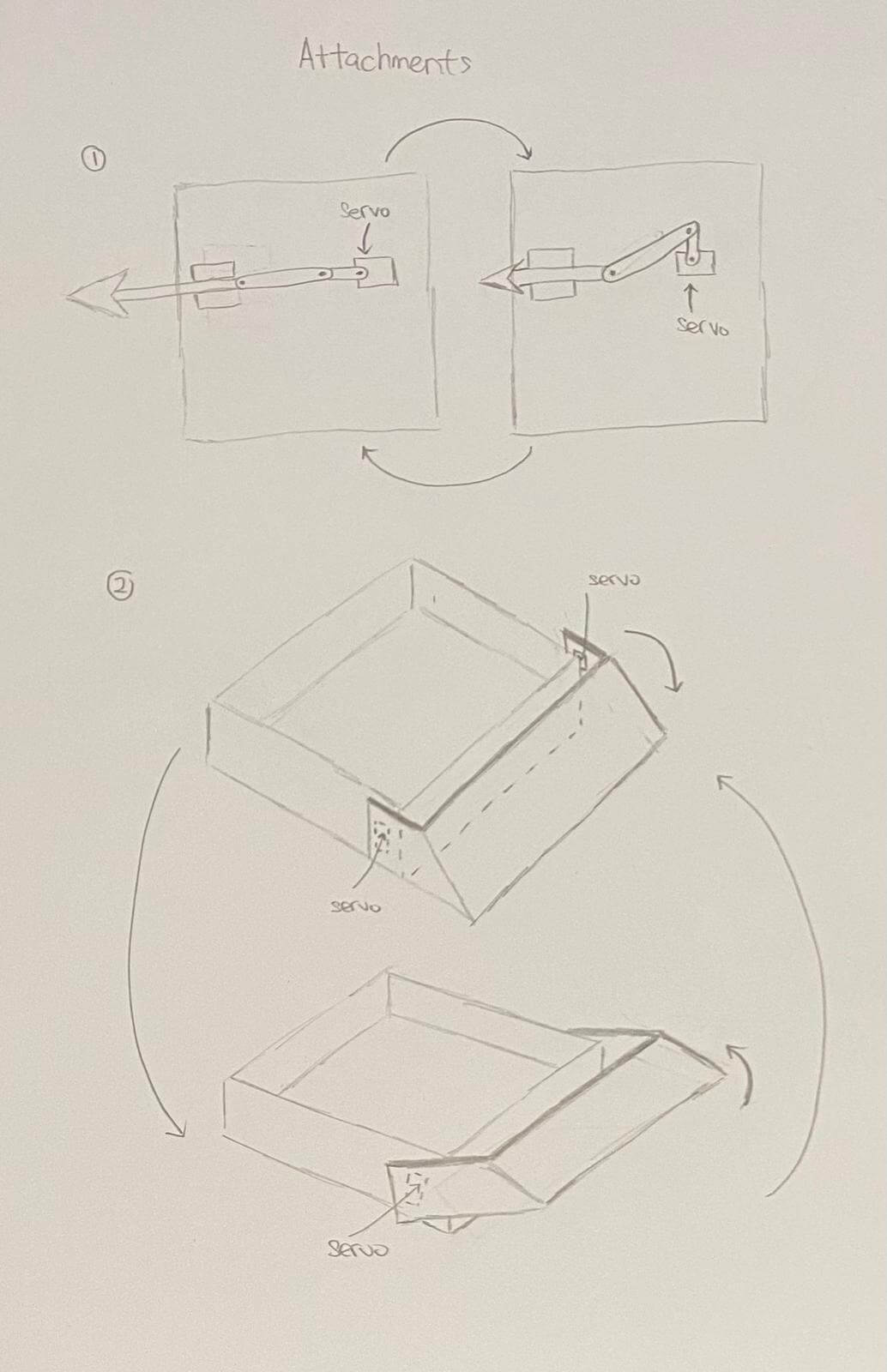
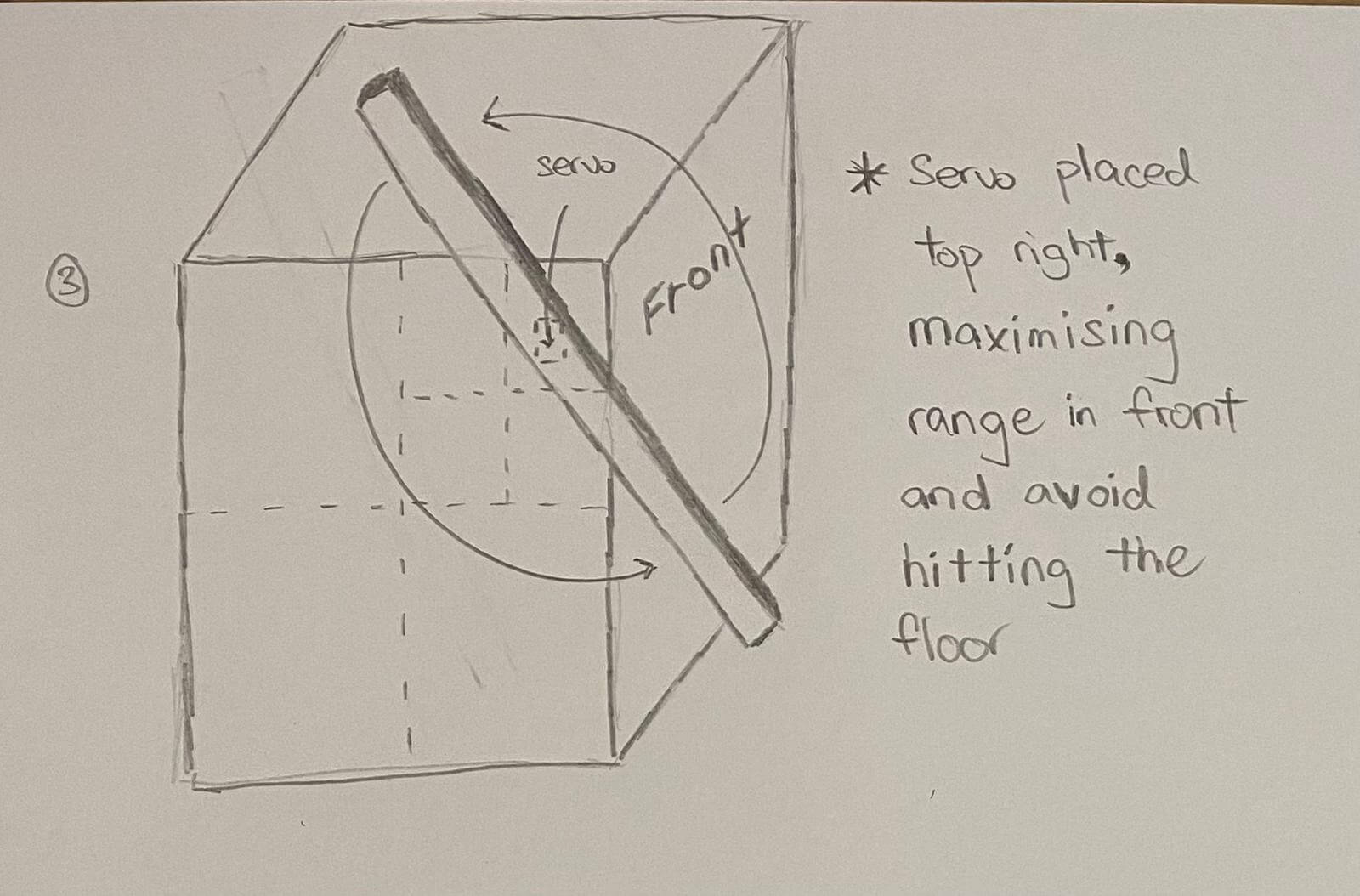
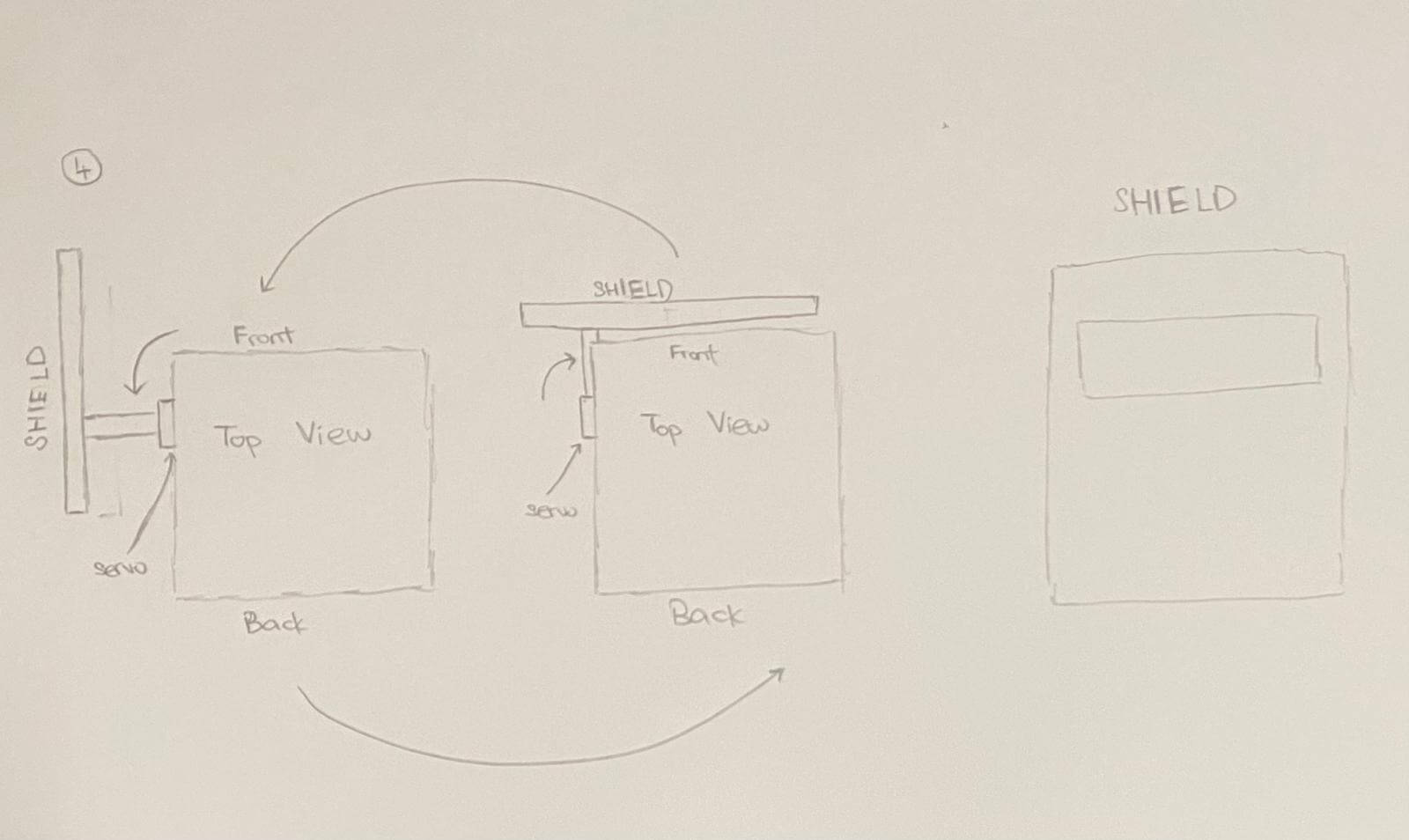
Attachments:
It really makes sense to create an attachable design with some attachments. In this way the robot can be converted to a race car or a sumo bot or anything you want. One of the most attracting things for me is making some modular thing.
Even you don’t have to create a robot from scratch. Maybe you can use the current Curio design and create some attachments. Just an idea…