2nd Prototype
Learning from the previous iteration, we recognized the need for further exploration, especially concerning sustainability goals. Consequently, the focus of this prototype is on using recyclable parts, such as cereal boxes, as an extension to the Curio base (phone holder). This approach ensures that if any part gets damaged, it can be easily replaced.
Additionally, our team aims to promote versatility in design, enabling students to build not only a robot but also alternative forms, such as a rover, using our guide. This will encourage students to appreciate learning through the Curio.
To enhance stability, we added a clamp-like holder for the phone, as we noticed that the phone could fall off during operation. The clamp is adjustable to accommodate various devices, such as phones or tablets, securely while the rover is in motion. This innovative design was inspired by the issue highlighted in the storyboard page.
Design Thinking
The "Empathize" section is mentioned in the 1st prototype page. "Define" and "Ideate" is mentioned at the previous section of this page.
Prototype (AutoCAD)
AutoCAD was used this time to draw our front, back and side view of our prototype.
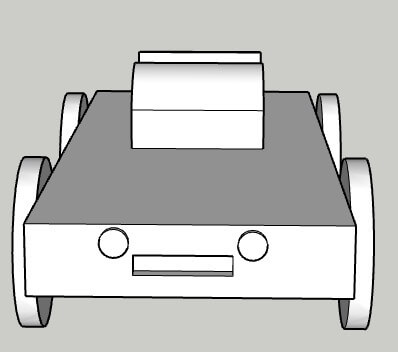
Front view:
Our front view shows the smartibot control board which act as the front ("face") of our car. The cramp can be seen this wheel.
Back view:
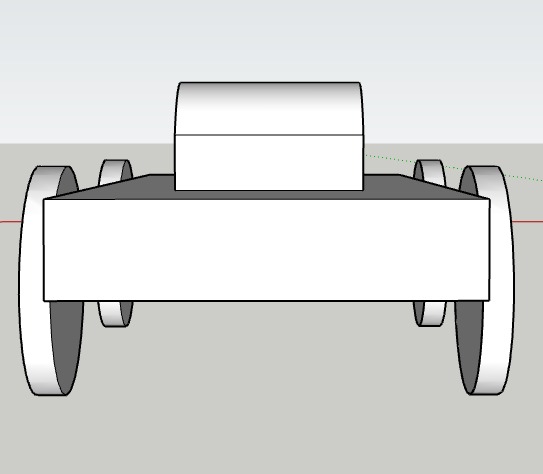
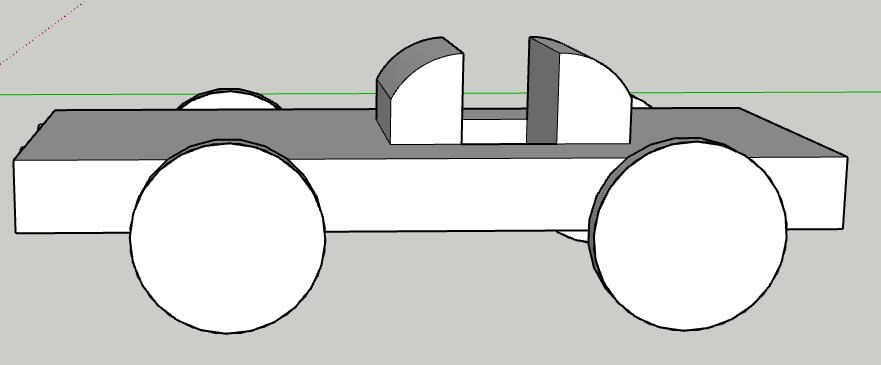
Side view:
The side view shows the space between the cramp. The cramp can be adjusted so that it can fit any types of phone/tablet.
Prototype (Sketch)
We decided to just sketch the top view as it requires too much effort to do draw it on AutoCAD.
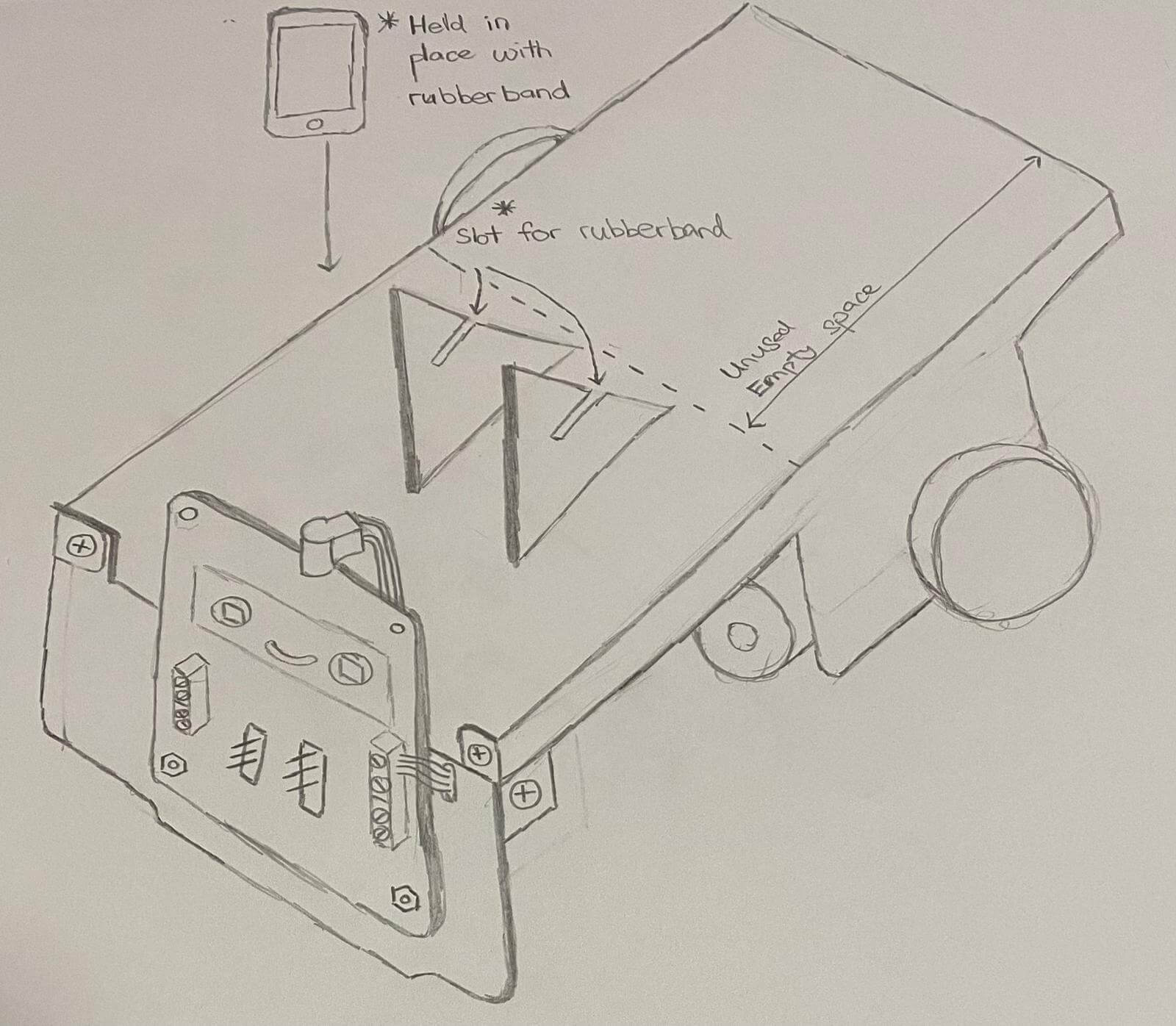
Top view:
A rubber band can be slotted into the cramp to hold the device more securely. The sketch also show that they are unutilized empty spaces which we should do something about it.
Test
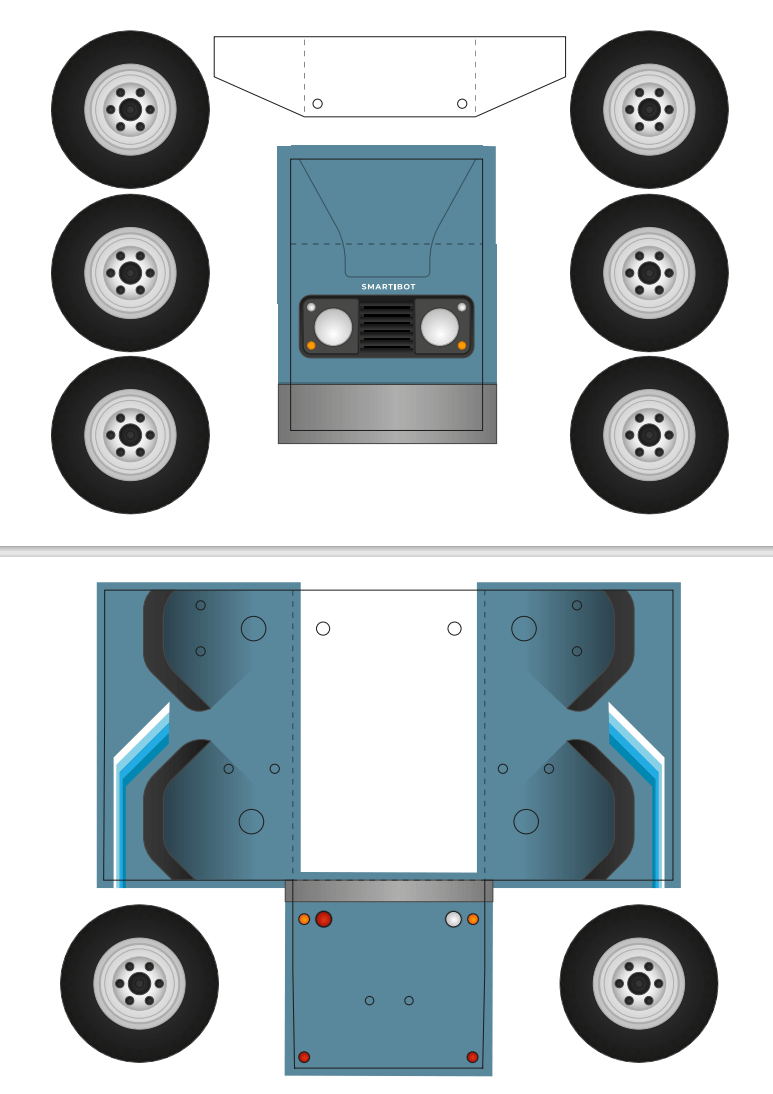
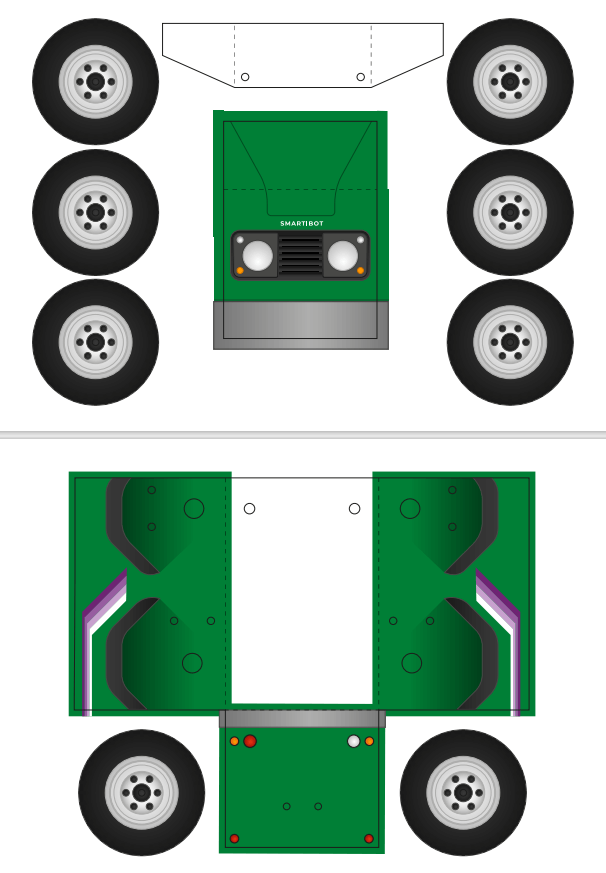
Template:
These are examples of the template that we will be providing.
The blue version
The green version
Guide:
Click on the button to get the guide to build the rovorbot
Click HereVideos:
We have physically build the prototype this time to test it using cereal boxes from our breakfast😆.
Rover moving forward:
The video shows that the car can move at a regular speed.

Rover doing a 360° turn
This is one of the requirement for Curio bot which is illustrated at the storyboard page.

Learning points
While our prototype successfully fulfills the objectives of sustainability and affordability, it lacks significant versatility. Our efforts to remove any unused space within the car could potentially hinder the turning of the wheels. Furthermore, we acknowledge that the design may appear too basic and require further refinement.