20 July 2023
Project:
Today we brainstorm possible ways to use smartibot to make teaching engaging. Here are some of our ideas.
1. AI Drawing Bot: Use artificial intelligence for the bot the learn and draw pictures
2. AI Race Cource: Use artificial intelligence to study and navigate around the course and race to see which team is the fastest.
3. AI Football: Use artificial intelligence to challenge teams in a robot football match
4. Obstacle Course: Use artificial intelligence to study and navigate a course and see which robot can navigate the most optimal way.
5. Paddle Boat Race: Create a AI paddle boat that is able to navigate the river and compete to see who is the fastest.
We have also identified some limitations of the smartibot. It does not have an area to secure the phone, the initial way was to tie a rubber band around it. We decided to change one of the pieces to allow the phone to be placed without the use of rubber bands.
Prototype V1:
Before:

After:

Experiment:
With phone

21 July 2023
We today realise that we were going off track, we were too focus on how we make the lessons engaging instead of designing the Curio bot and we focus more on improving the Smartibot instead of the Curio.
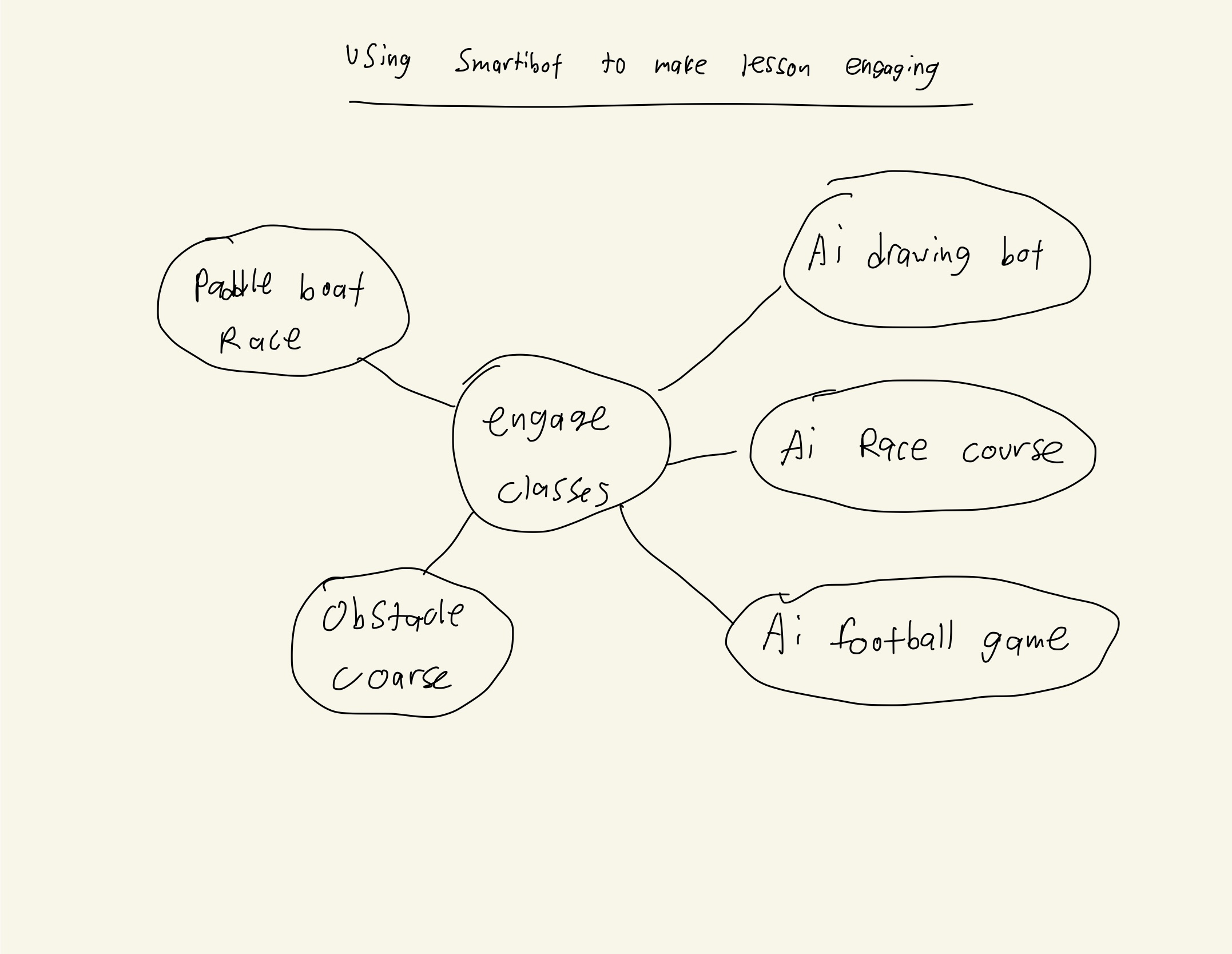
We immediately rectify by meeting the client and clarify our doubts. After the meeting we managed to get everyone aligned and draft a suitable markup of the prototype.
Prototype:

After today, we have a first hand experience on why aligning with everyone in the team and
the customer is important as it saves time and effect in creating prototype and the final product.
24 July 2023
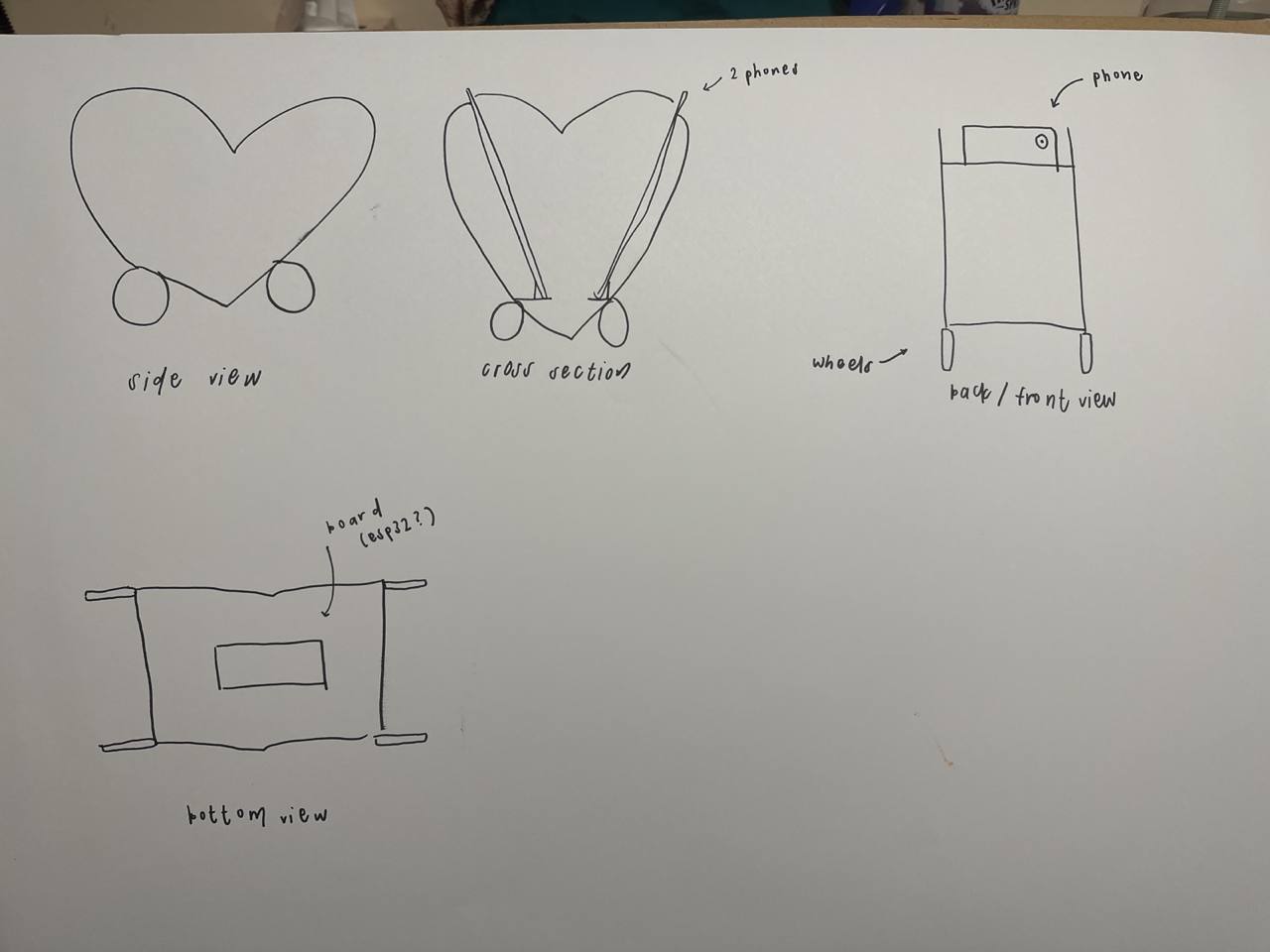
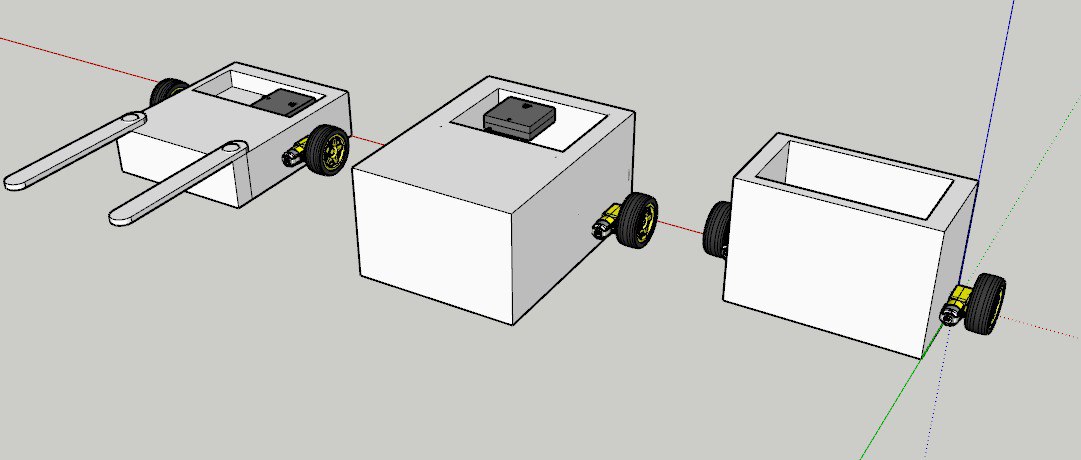
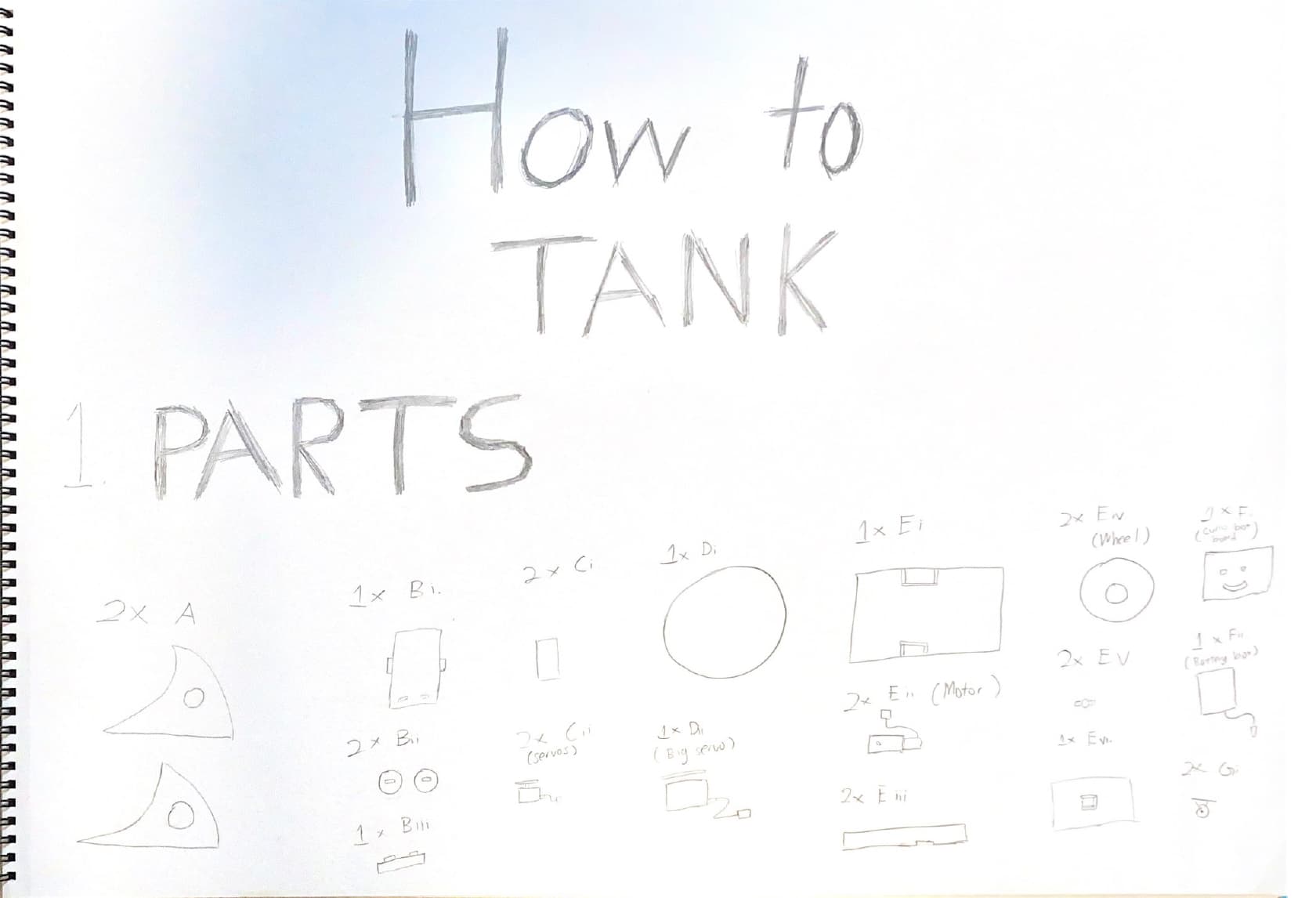
Today, we manage to design new prototypes by combining ideas from the previous 3D model and also ideas provided by other teams.
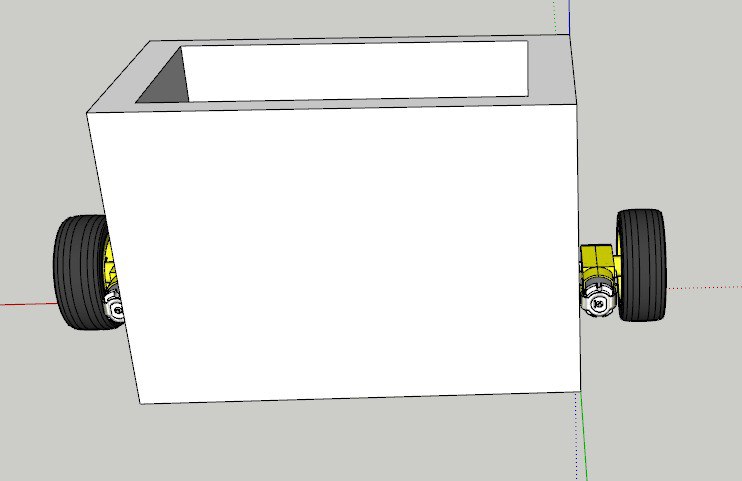
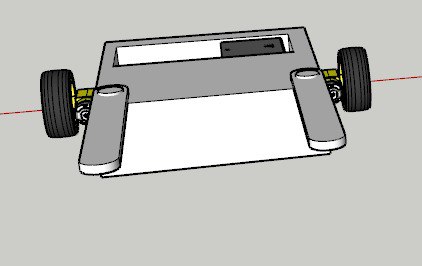
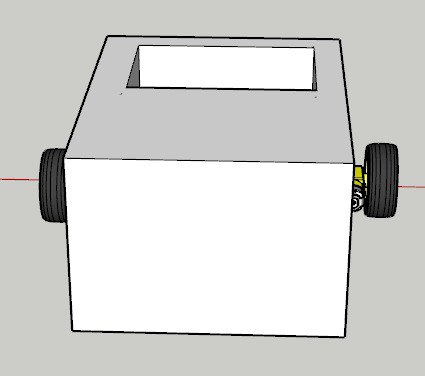
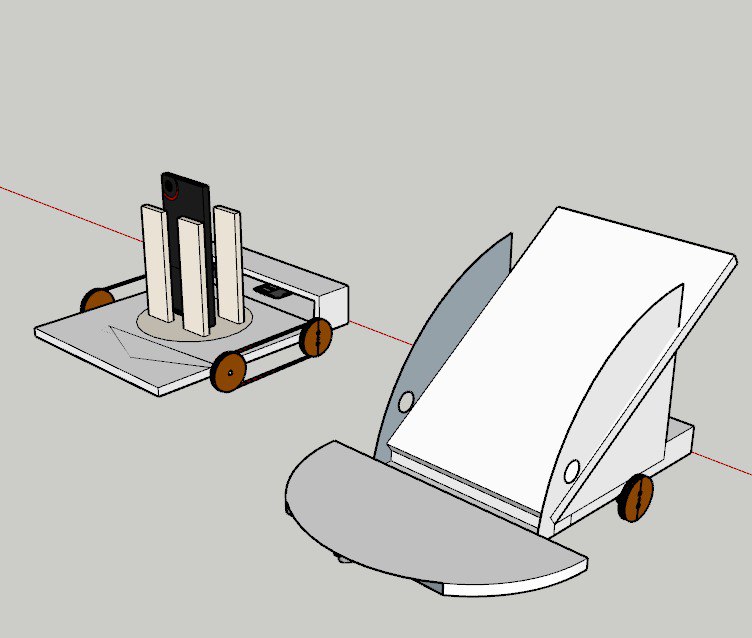
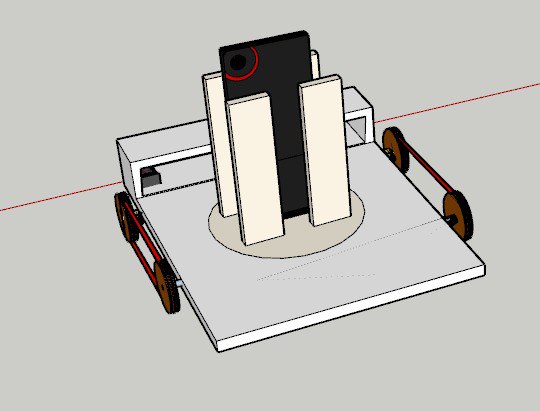
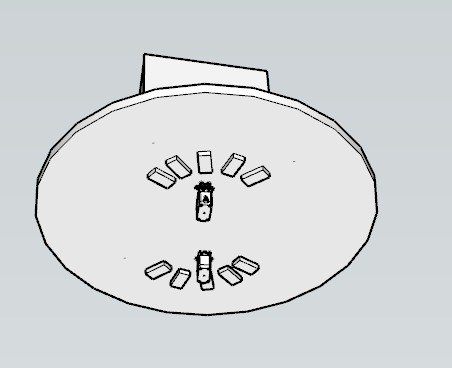
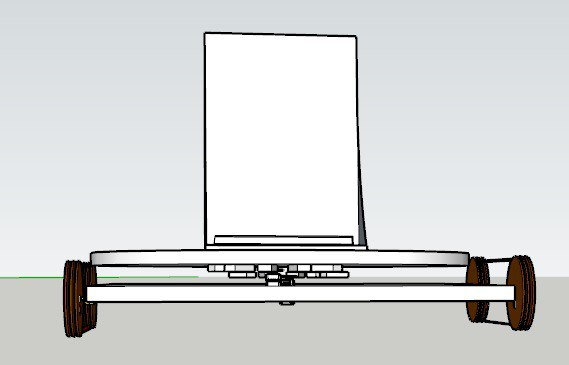
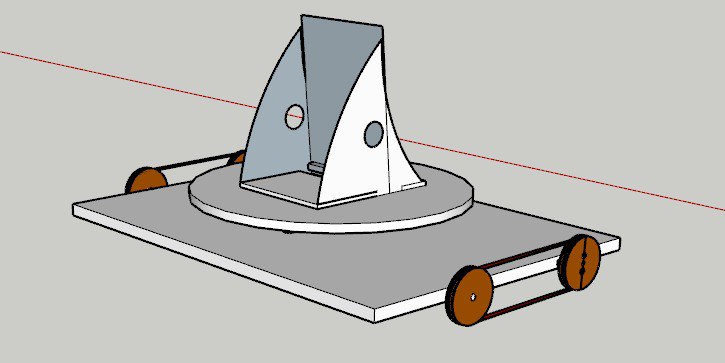
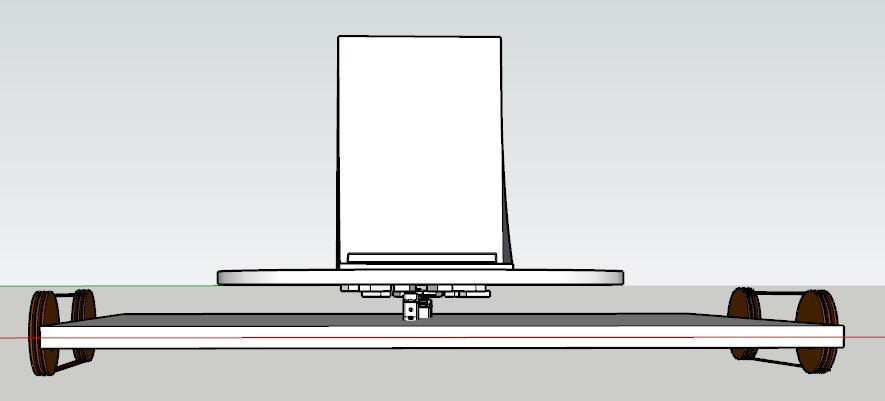
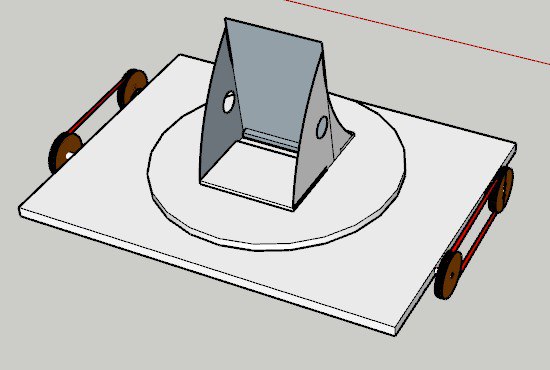
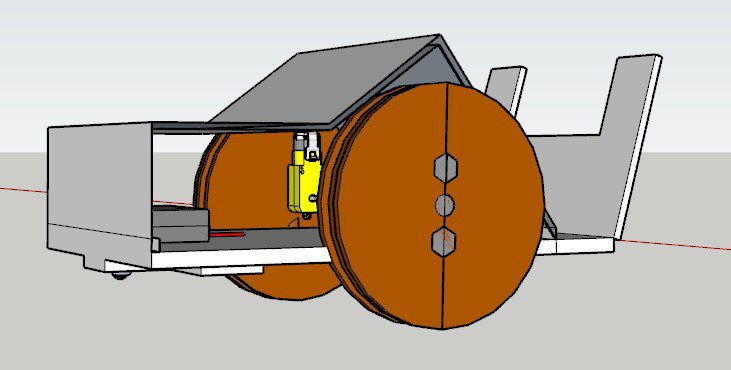
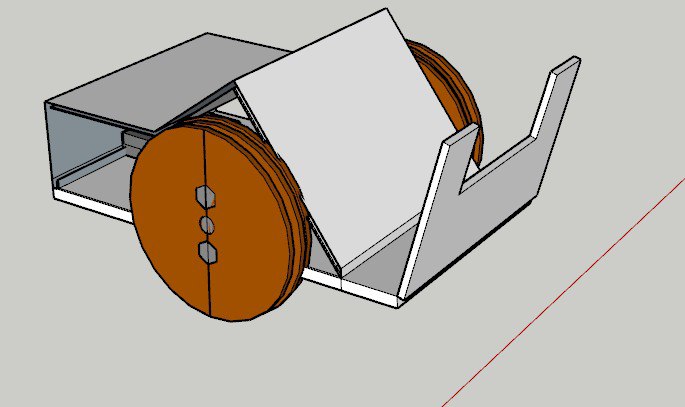
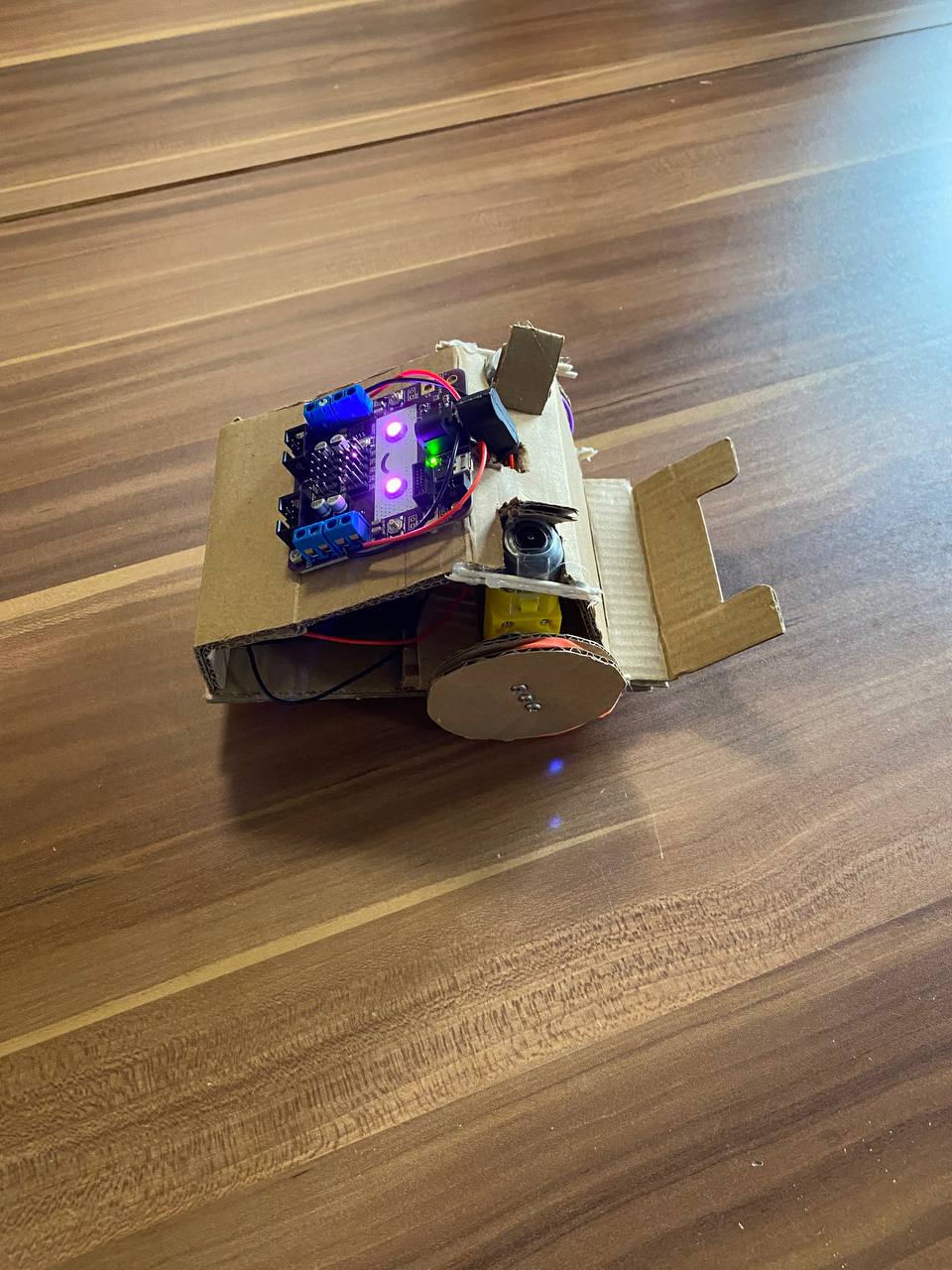
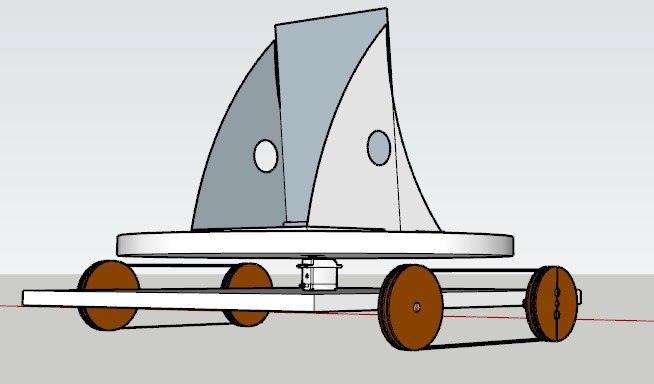
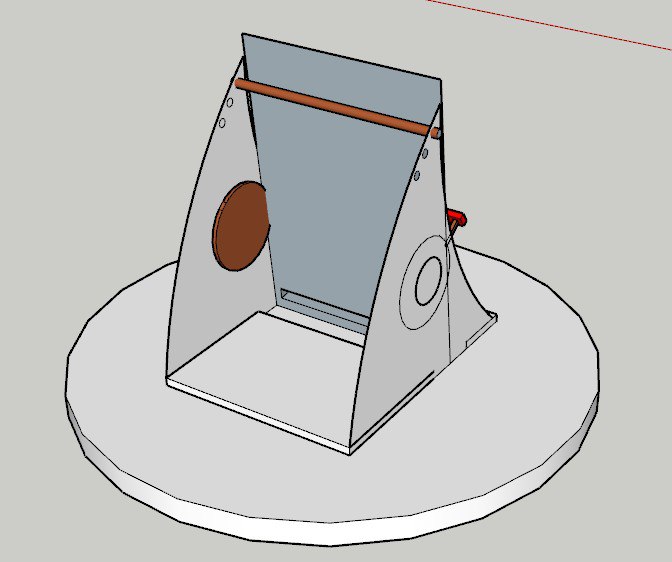
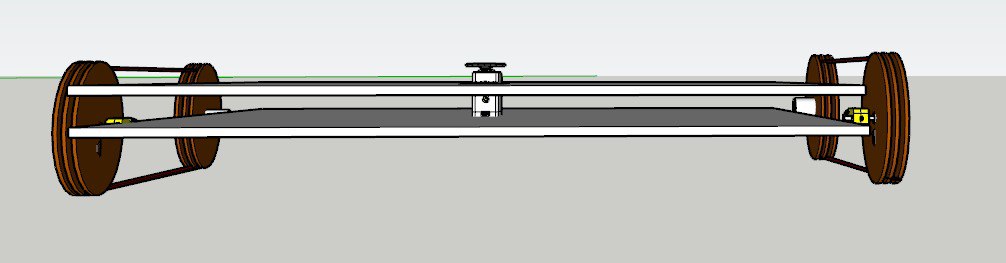
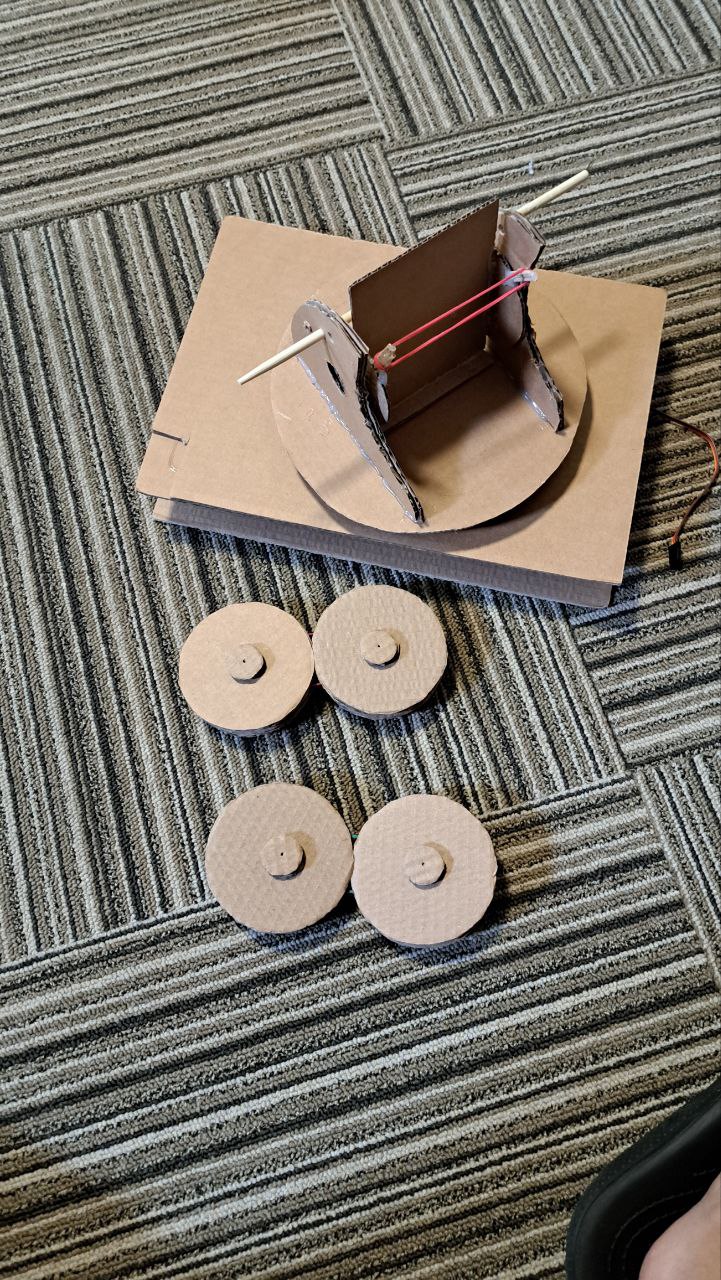
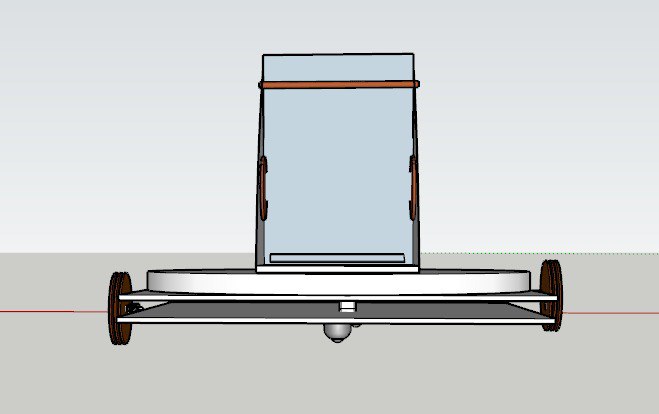
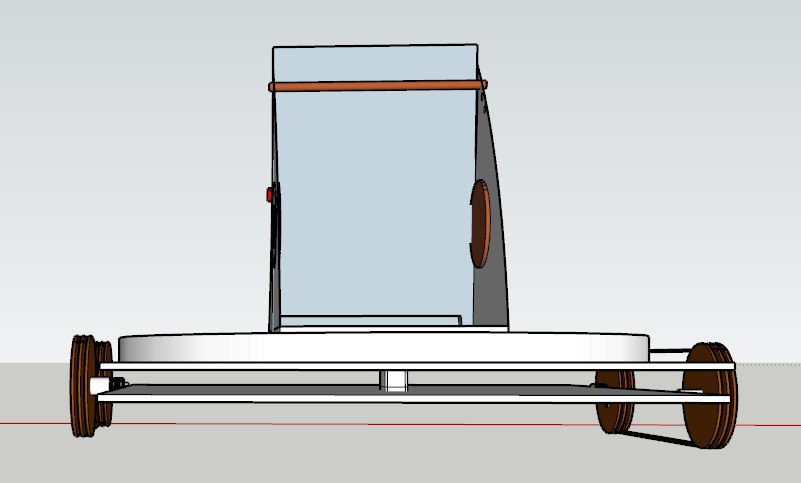
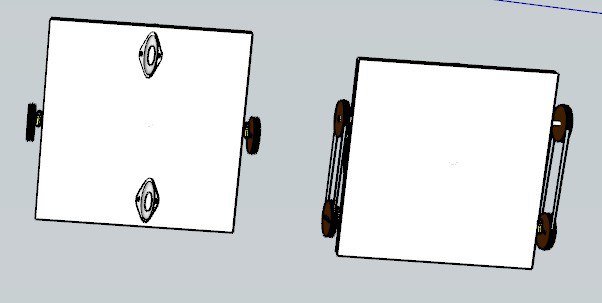
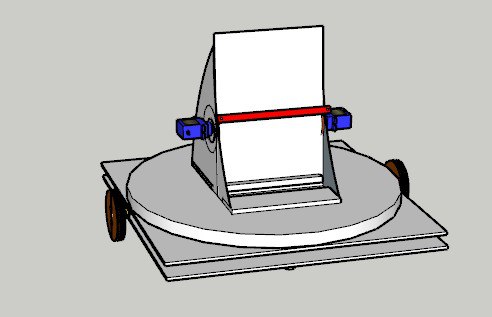
3D model (Tank):
For this design we got the inspiration from a real life tank. Basically, we allow user to rotate the top
base to help them orientate the bot, so it does not matter which side of the bot is the front. The bot
would be able to rotate using servos which will fit to the teeth shape groves below.
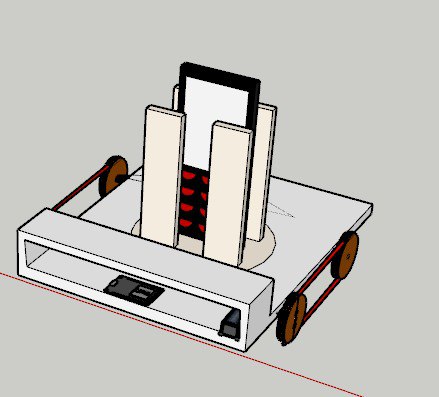
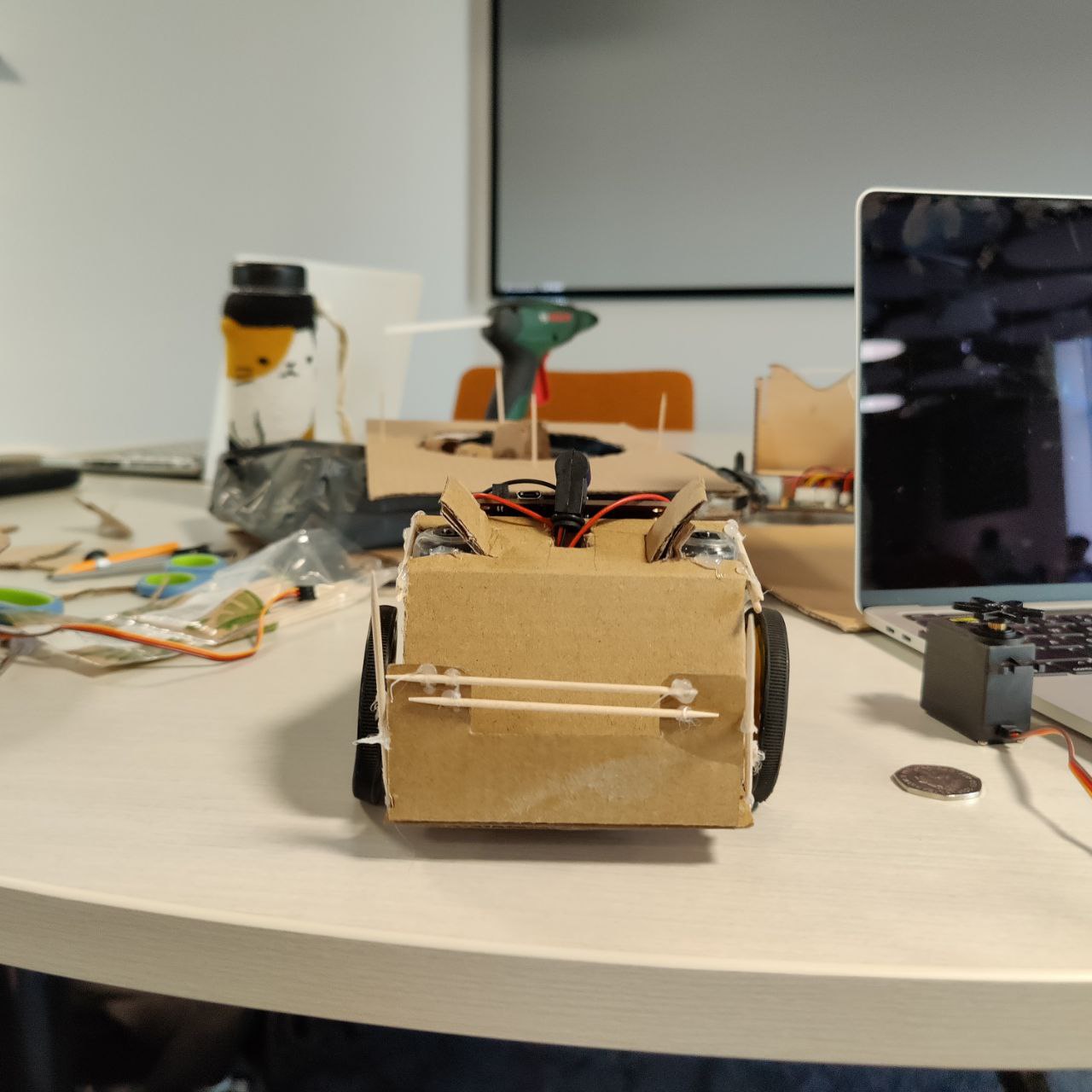
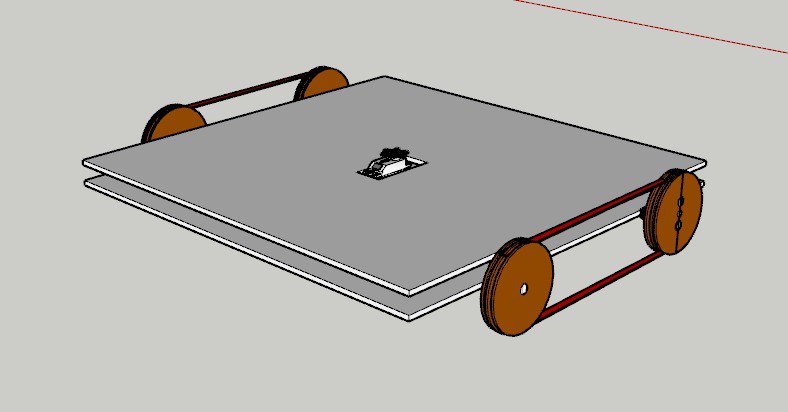
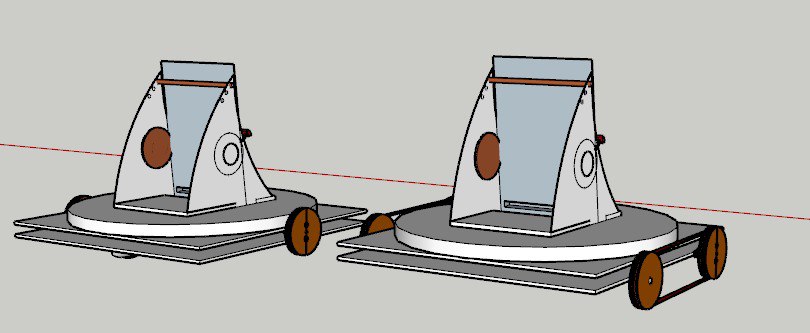
Reliant Robin:
For this design, we asked group 9 about their proposal idea to draw inspiration for our design. They
were planning to create quizes and make the bots race. So we design one where it has car-like
shape. We based the design of the reliant robin as it is an iconic vehicle in the UK. We also can
save cost on material by making 2 wheels instead of 4.

Prototype:
We also manage to do up a working prototype of the Reliant Robin design. Although there are a
few kinks to fix like if the phone is place at the back it will be back heavy, motors will come loose
and most parts are glued so not a lot of ways to dismentle.


Tomorrow, we plan to continue working on the prototype for the tank design and improving the current prototype.
25 July 2023
Today we managed to improve the Reliant Robin Prototype to move smoother and carry phones by
adding the tyres from Curio and adding some toothpicks at the back to act as a skeleton. There are
still some limitations, such as it can only support lighter phone and heavier phones will topple if
move at a fast speed and it's not able to change the angle of the phone.


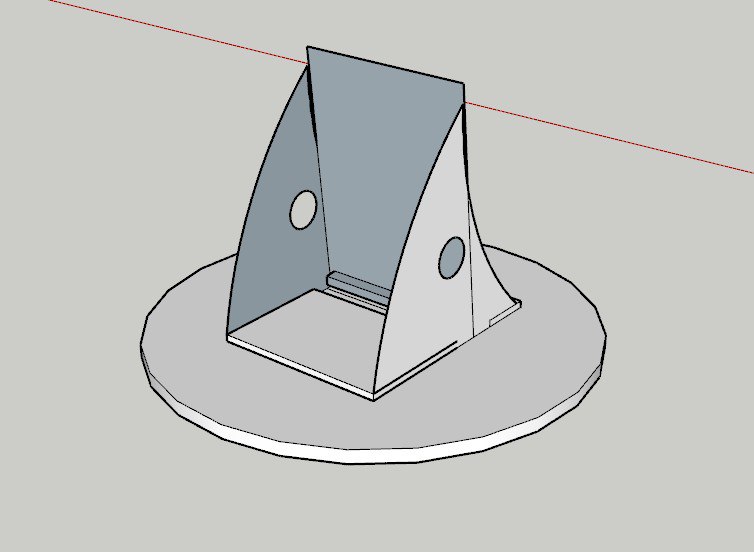
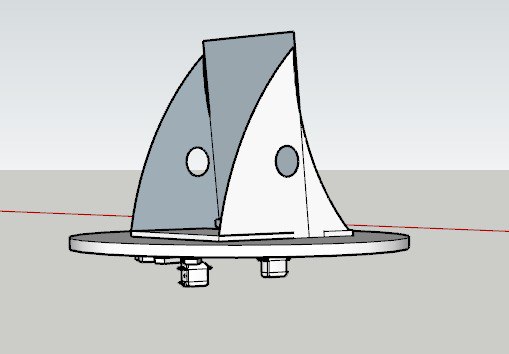
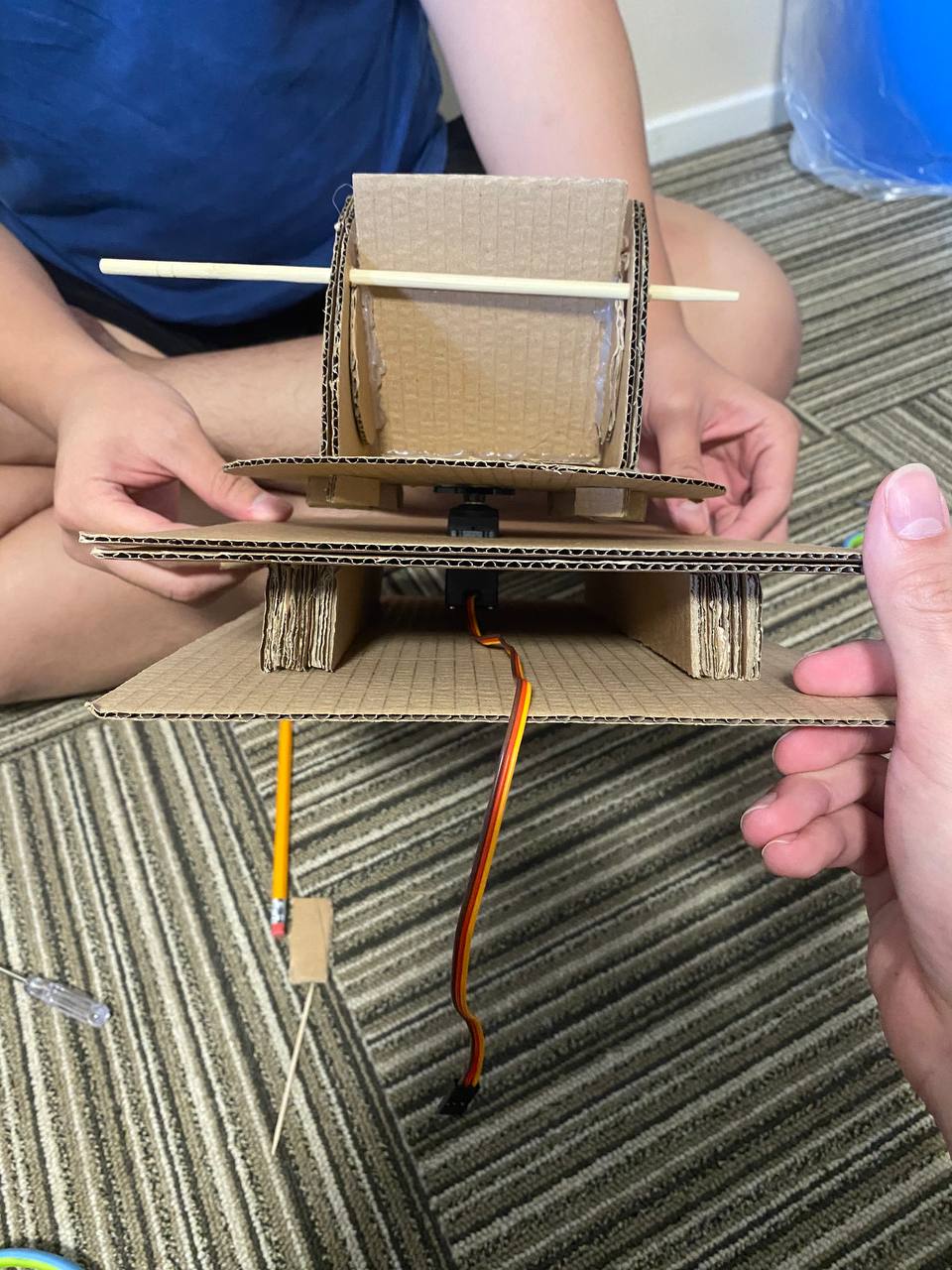
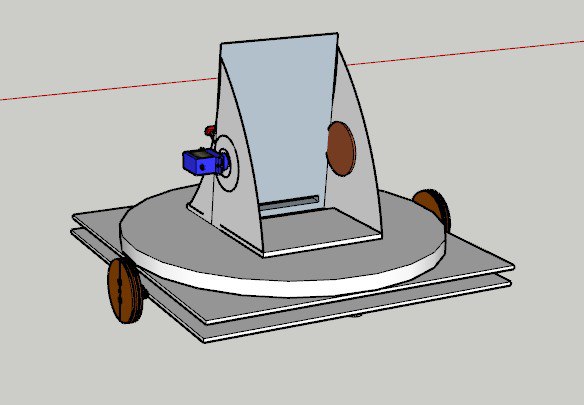
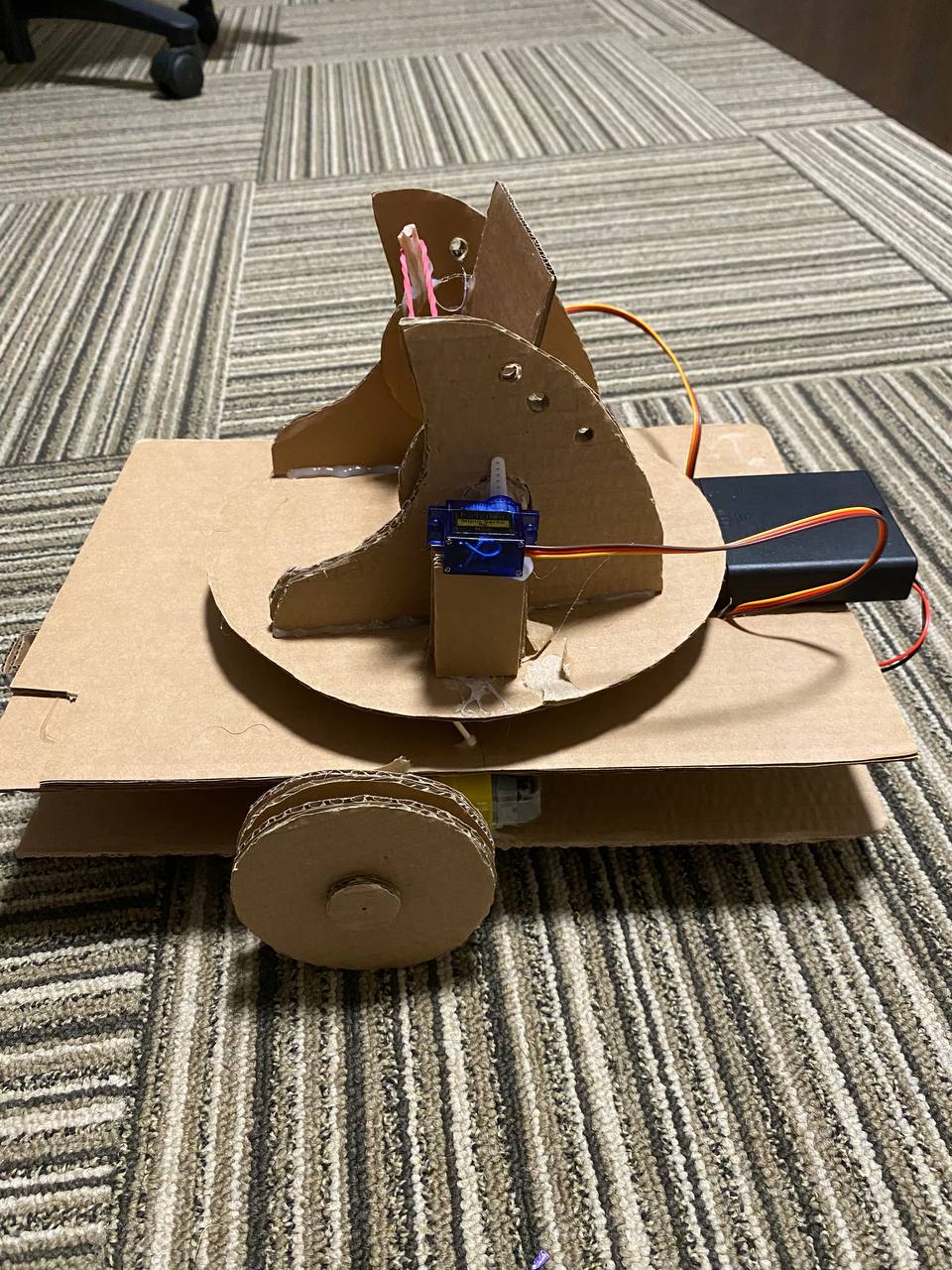
We have also created a rotating base for the “Tank” design to withstand the weight of the phone
and rotate with it. We decided to use only 1 servo to rotate as the previous method using grove did
not work well. The limitations we notice for now is that it can only rotate up to 180 degrees.
Tomorrow, we will continue working on the Tank Model and try to improve on the reliant robin model.
26 July 2023
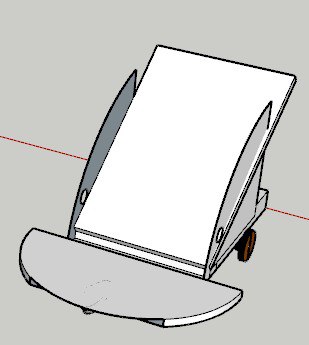
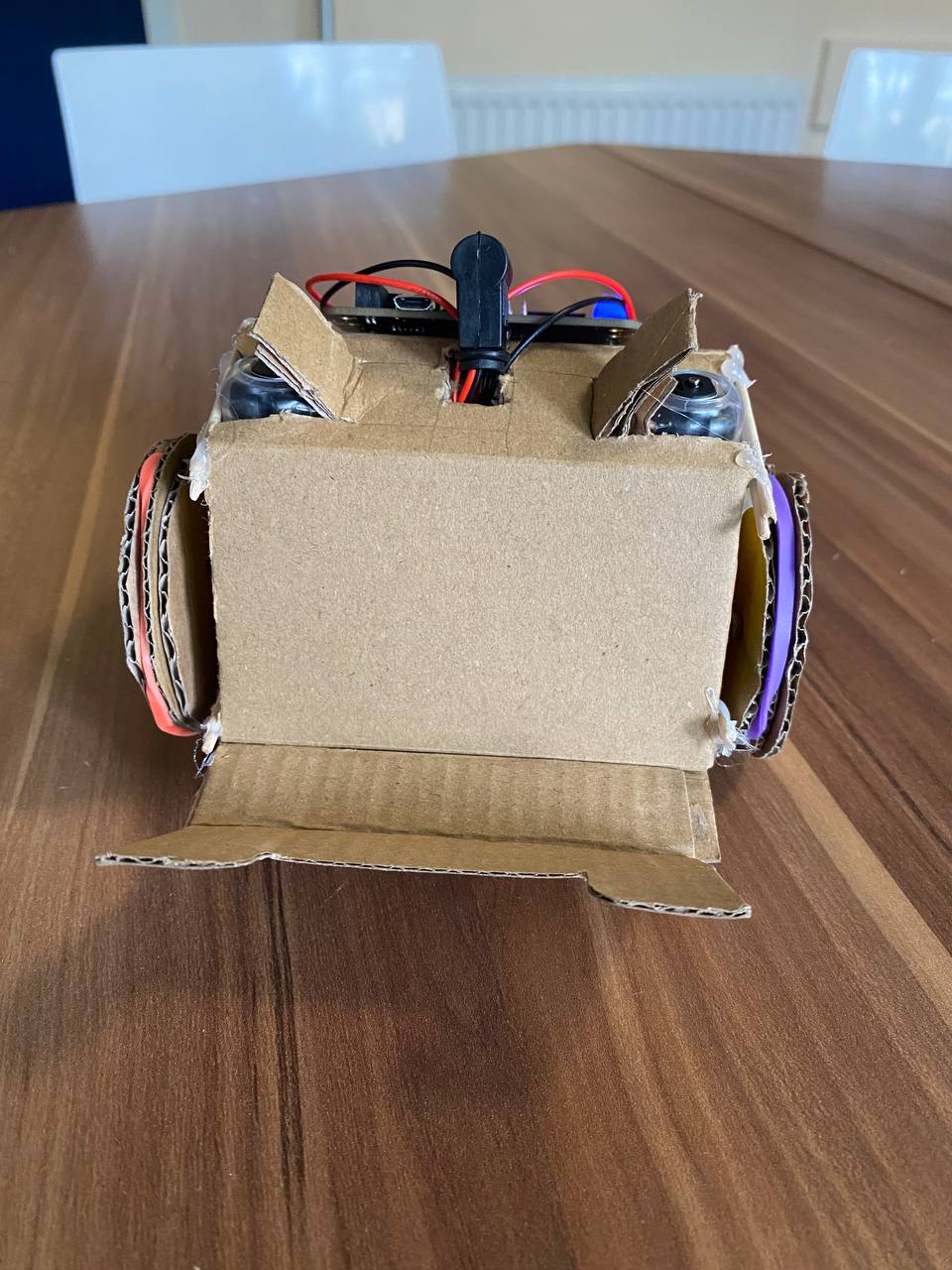
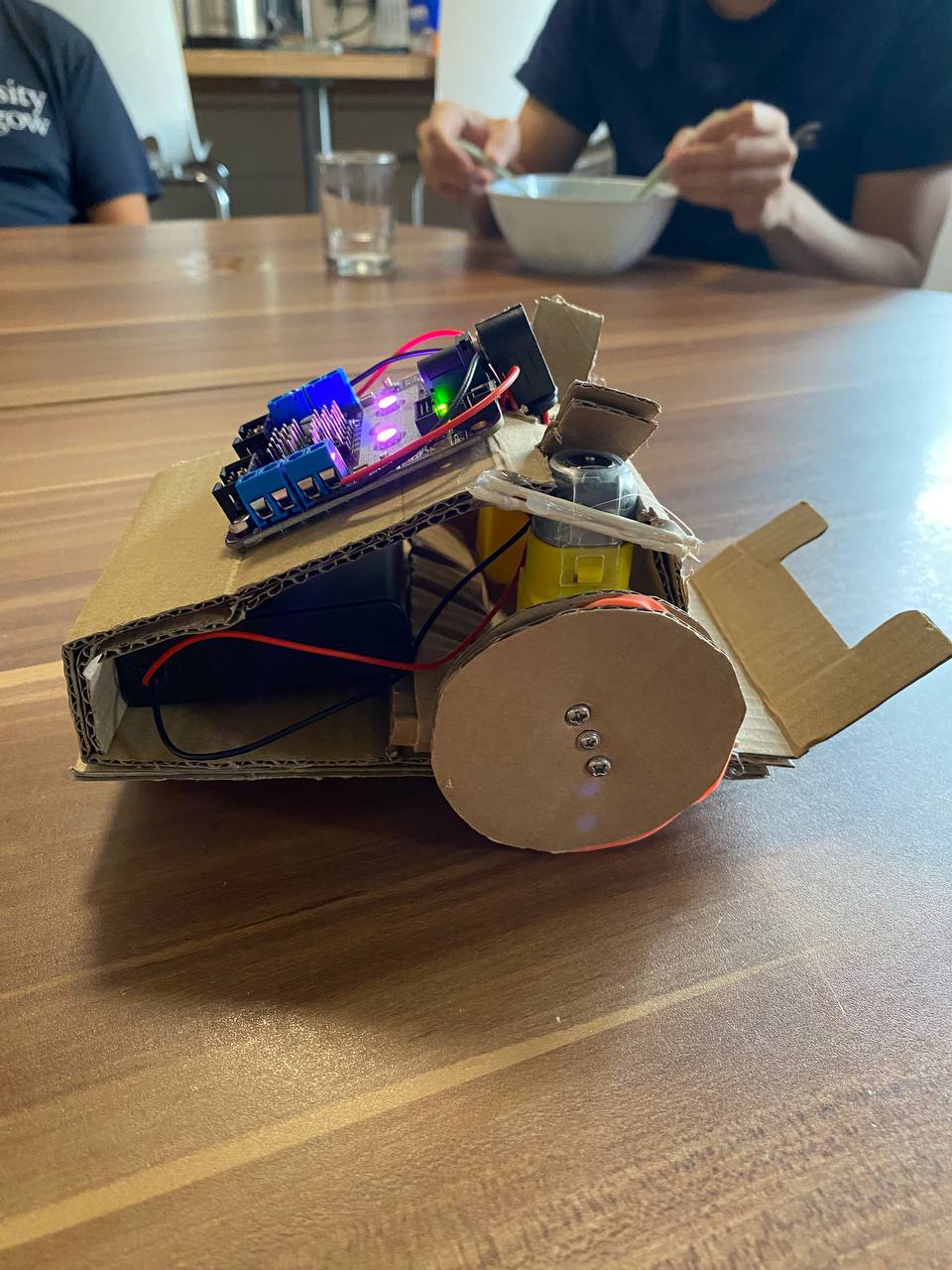
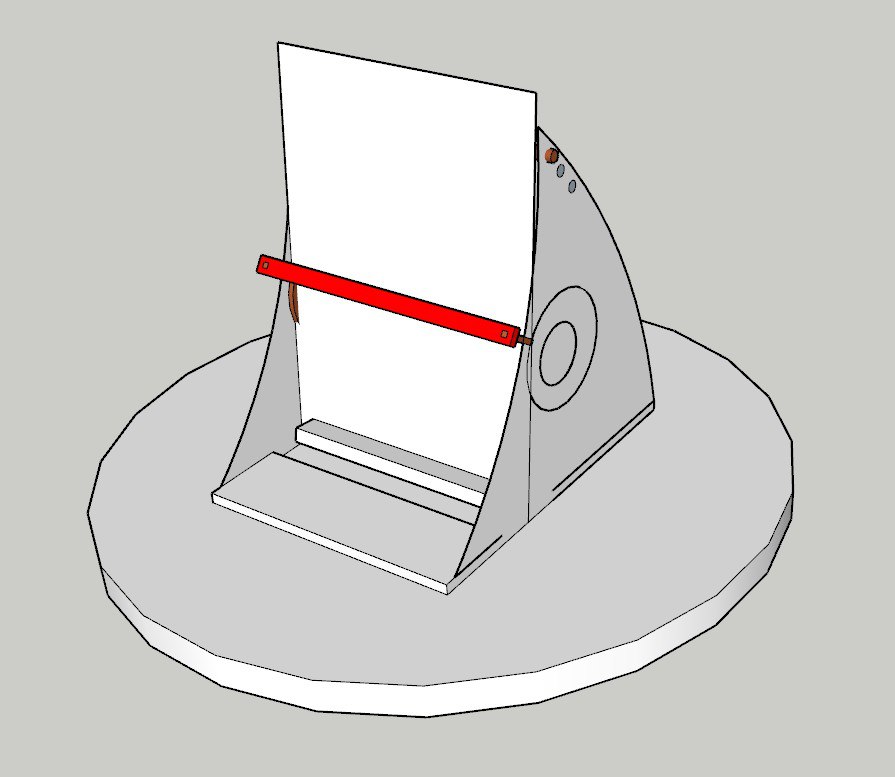
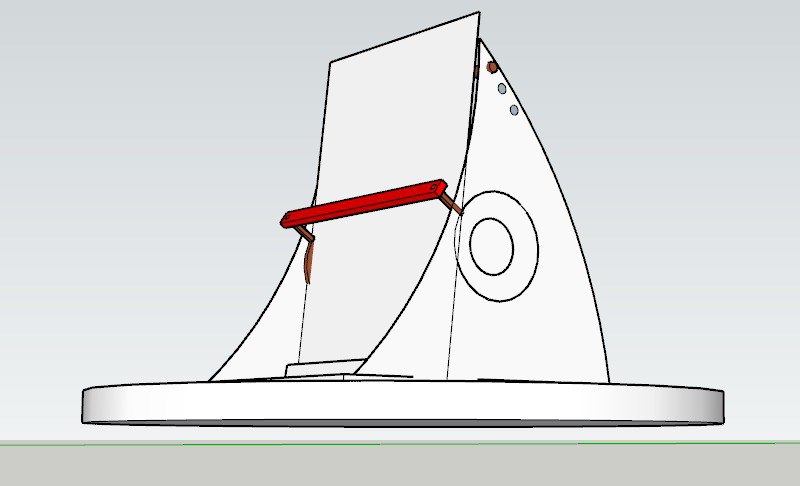
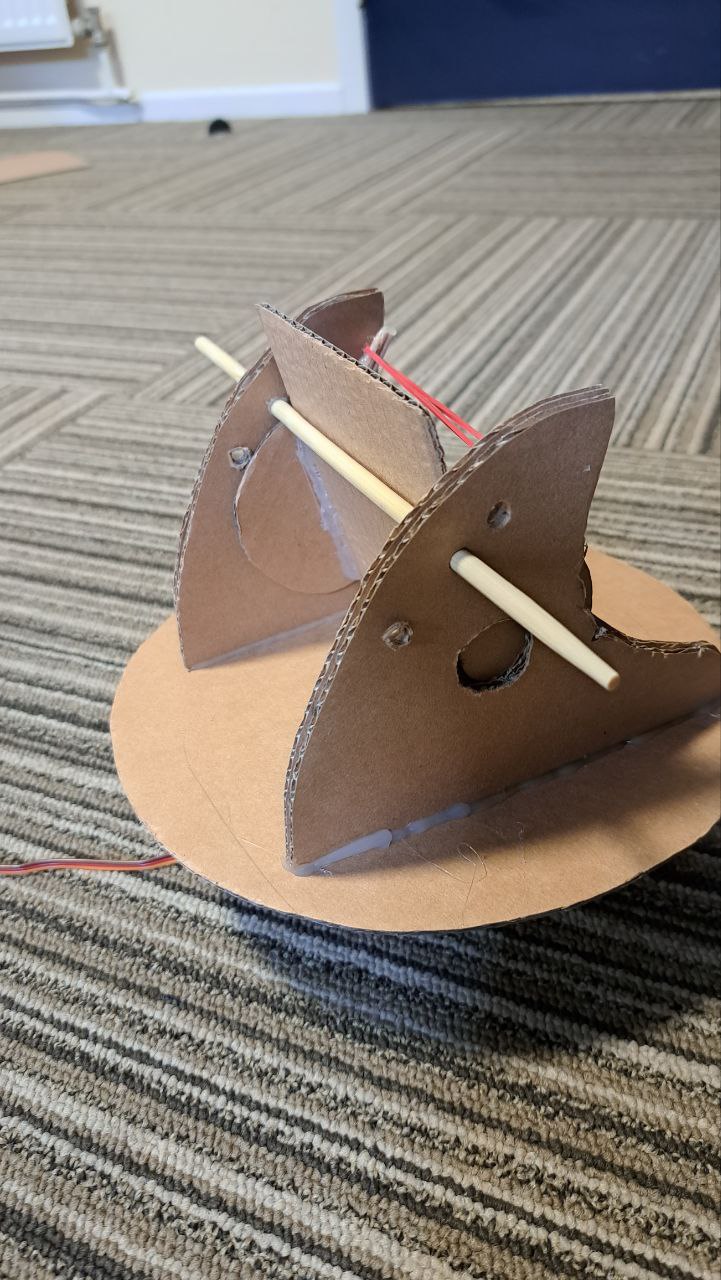
We added some new features to the Tank design, after conducting a few testing, we realize that the
phone adjusting system does not have support to prevent the phone from toppling over so we
decided to add stoppers at the back to prevent the phone from falling. We also added an adjustable
stick to make the phone at a fixed angle.
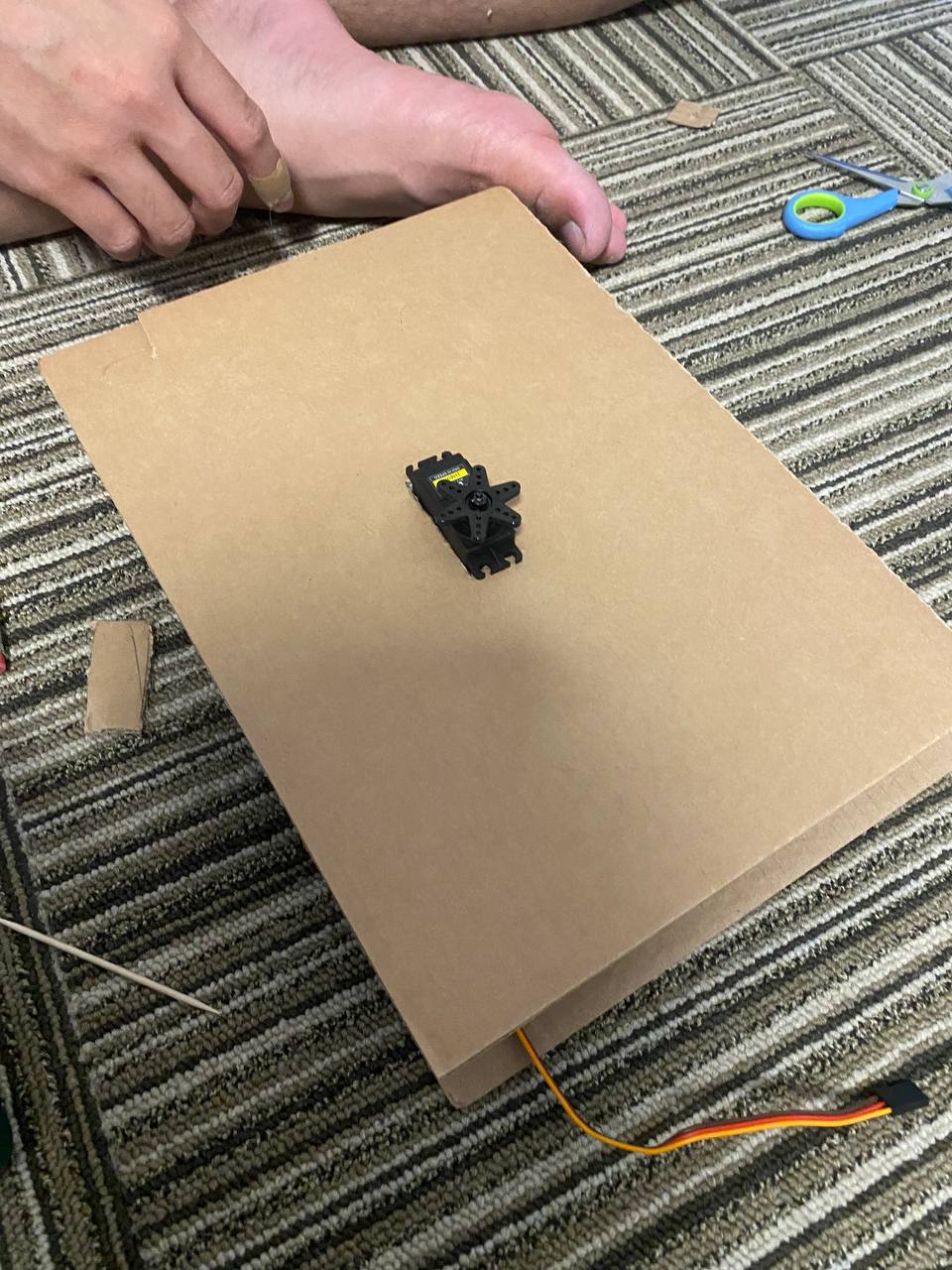
For the prototype We finished creating the base and the wheels, so tomorrow we will assemble all
the parts together and conduct an initial test. We feel that we could do more today, however, there
are limitations in the glue gun provided as it only has a work time of 30 minutes and it cannot be
used while charging. But it was not much of a problem as we continued working on the other
deliverables like the website while waiting to charge.

We also emailed Gordon Williams, the main designer of Curio yesterday to organise a meeting to
give us possible feedback and better understand his thinking process and constraints he faced.
Currently waiting for a reply.
27 July 2023
Had a group meeting with Gordon Williams the creator of the original Curio bot. We manage to
learn about his thinking process in creating Curio and the constraints he faced and how he use this
constraints to his advantage.
Here is a summary of what was mentioned in the meeting.
1. Stepper motor is the most cost-efficient to get the result he wants since precision is the goal
2. Constraints : being able to tilt the robot in various angles
3. A lot of the stuff being done is still experimental
4. Would be beneficial if parts are easily assembled and detachable, it takes a while to assemble the entire robot.
5. Trying to keep the material cost down to something sensible
for example servo motors with the electronic magnet are not practical as they cost 2/3 of the entire cost making sure the wheels and the back wheel are always in stock.
Try to keep the material used simple, might consider implementing 3d printing , consider using plastic for the wheel.
6. Another weak point would be the phone stand. (Very floppy)
7. Keep it to a reasonably small amount of parts
8. It is nice to have modularity as most universities are able to 3d print it
9. Curio does have a control board and it is not possible to get the user to make a new control board from scratch, so focus of robot main constraints are the hardware (specifically motor)
Designer Feedback for team 10A prototypes:
1. Appreciates the rotation of the 2nd prototype as that facing.so his consideration but advise to ensure the wheels are rotatable in the direction that the camera is facin
2. Reinstate to have easier alternative to tilt the angle of the phone which the team plans to overcome using servo motors to automate angle positioning of the phone
3. When using 3 wheels, need a steering wheel(ball bearing)
Designer Feedback for team 10B prototypes:
1. Could consider using a stepper motor rather than DC(smartibot) to aid with the precision.
2. He likes the versality aspect of the design and having the students to assemble to their liking rather than sending an assembled bot which might be damaged in transit.
3. He likes the clamp design and does not have a use case when designing curio, we should think about our use case and work towards it
4. Initially he did not have a use case so the advice was to have a use case to work on the problems, e.g., if speed is something we are working on then focus on that direction such as point 2.
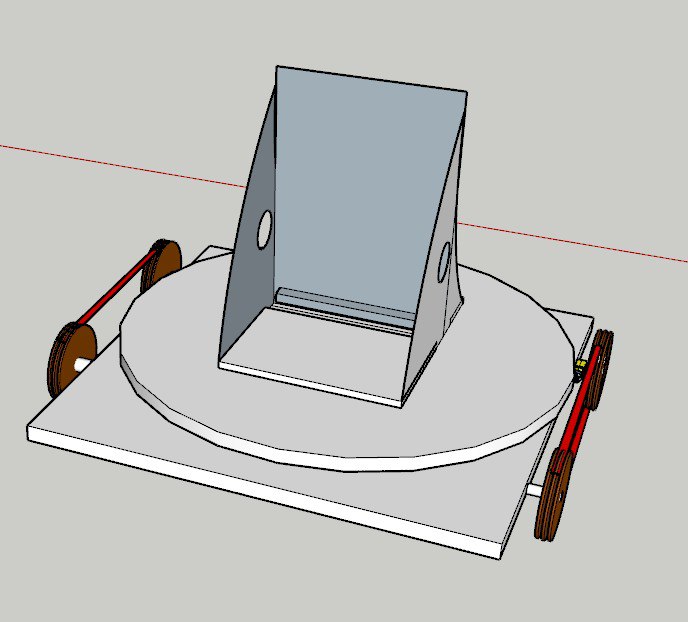
Prototype
After the meeting we finish up the tank prototype and redesigned it base on Gordon's feedback.






Tomorrow we plan to improve on the prototype and conduct testing.
28 July 2023
In today's lecture, we learned about how to conduct proper usability testing, to learn more about
what issues users faced when using the product. Our team plans to conduct it next week however
we are having a bit of trouble thinking of Task Scenarios since our project is mainly about creating
the robot. We were thinking maybe we can set up an obstacle course to see how the users feel
when controlling the bot.
For the prototype, we manage to finish it up by adding the 1 side servos to allow the phone mount
to adjust the angle remotely. However, we realize 1 servo is not enough to lift the phone back up if
tilted down so for now we tested with a power bank.

On Monday, we will try adding additional servo on the other side and start conducting usability tests
with some of our fellow classmates.
31 July 2023
We added a second servo to able to support tilting of phone. We also receive feedback on how to conduct testing by the professor where the user can be at the other room controlling and looking at the camera of the bot to test the mobility and visibility.

We continued working on the website and poster design as well. Here is the initial design of the poster.

Tomorrow, we will start to conduct our usability testing, continue working on website and poster.
1 August 2023
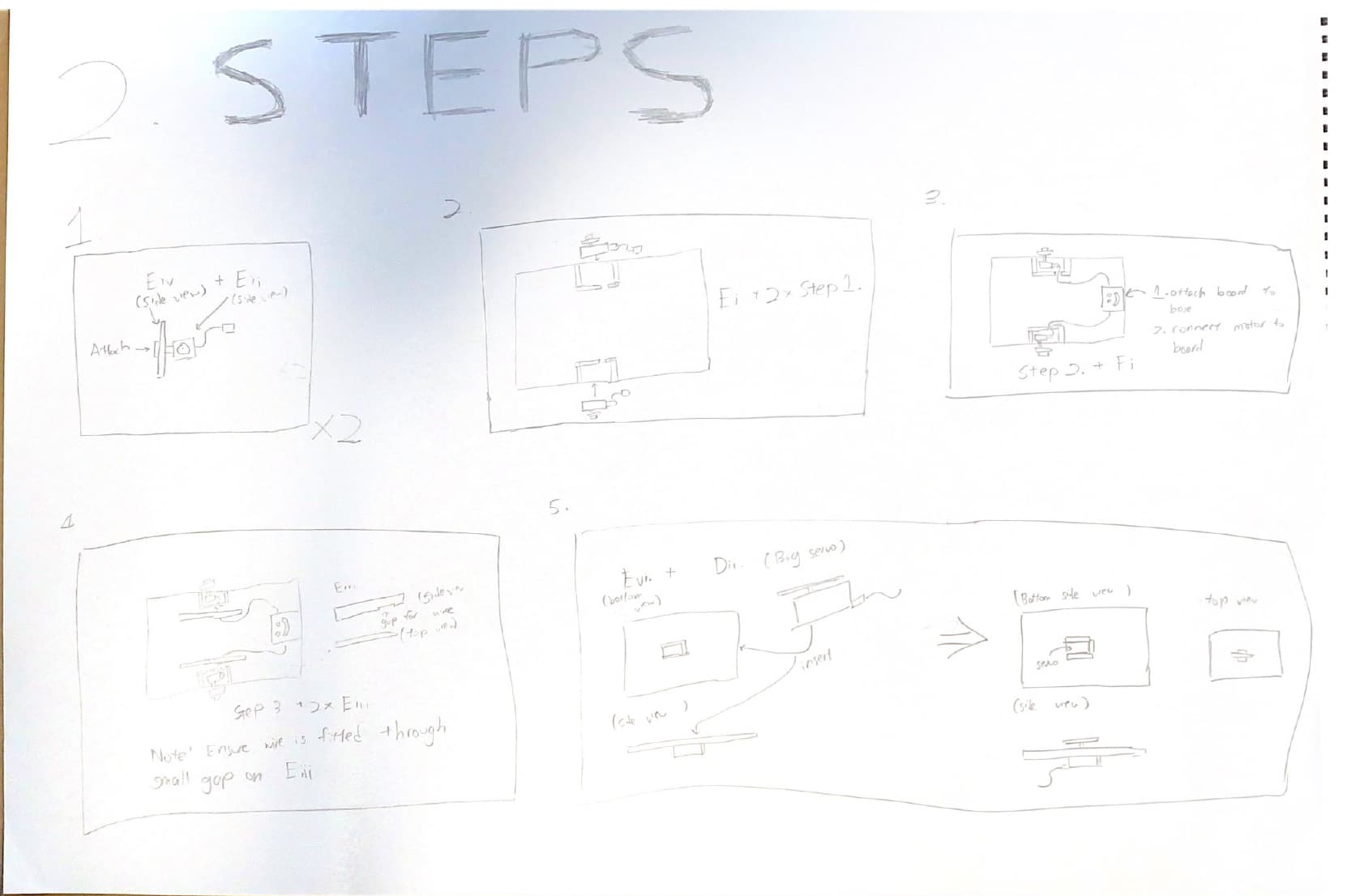
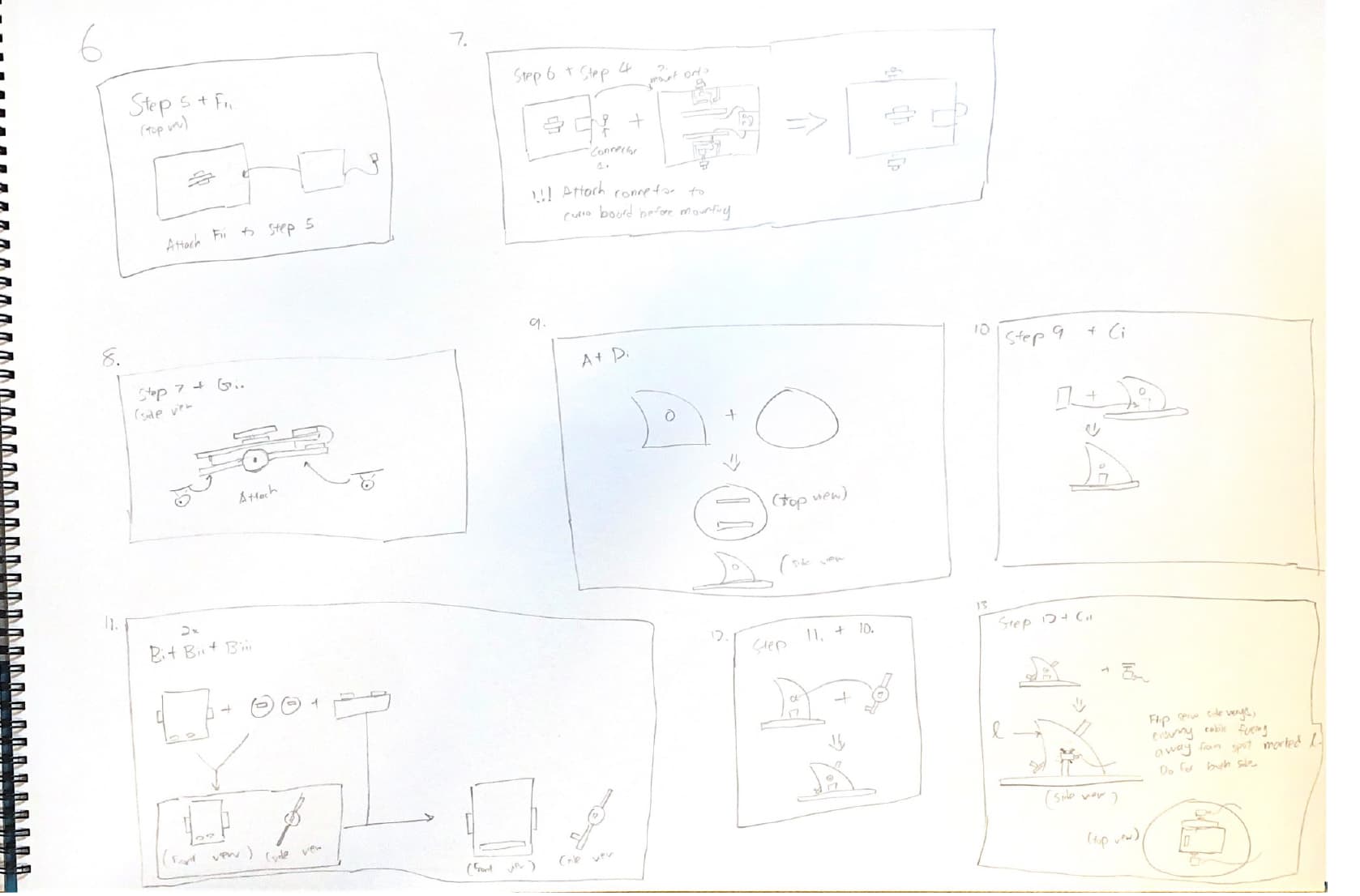
Received constructive feedback on the poster and the website. We have also plan to add instructions on how to build our prototype.
Website:
Home page Reflection Page
Poster:
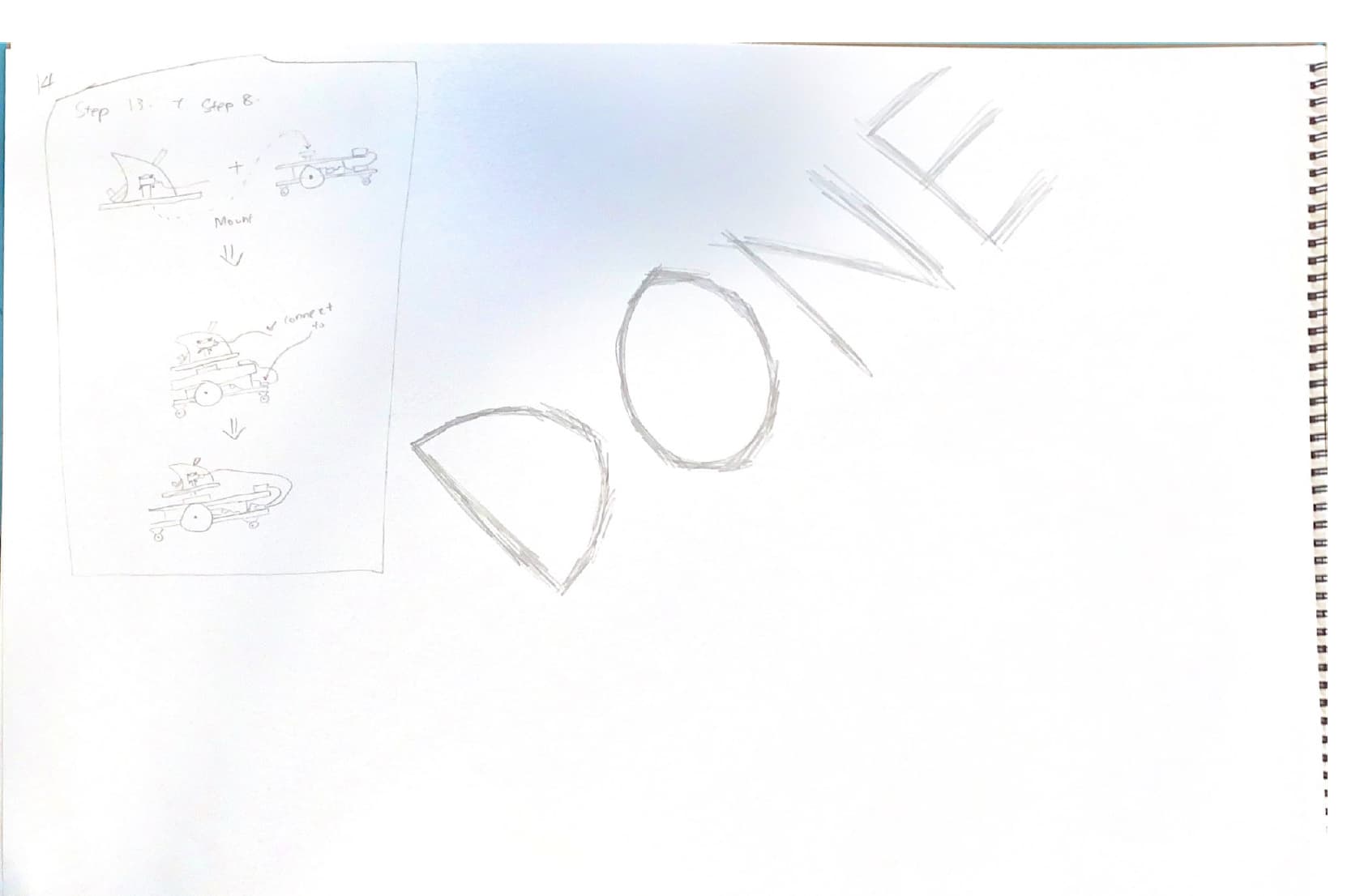
Instructions
Tomorrow We will make finishing touches to the poster, website and testings before the big day on Thursday.
3 August 2023
Finally, the day we have been waiting for, exhibition day. It was fun to see people showing interest and trying out the Curio Tank. It feels good when people approach us with questions about what we do and how we do it as there is a sense of accomplishment after 3 weeks of effort. We receive positive feedback when trying our the bot and they had alot of fun trying for team 10A and 10B’s robots.